
Fターム[2B043BA07]の内容
農業機械一般(操向) (6,001) | 車両の種類 (615) | 遠隔操向車両 (10)
Fターム[2B043BA07]に分類される特許
1 - 10 / 10
芝刈機
【課題】境界検出手段を支持するための支持構造を簡単なものにすることが可能でありながら、境界検出手段により既刈り領域と未刈り領域との刈跡境界を精度よく検出することが可能となる芝刈機を提供する。
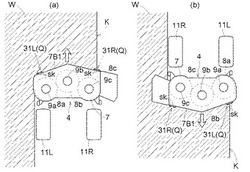
【解決手段】走行駆動装置11R,11Lにより直進並びに旋回走行自在に走行駆動される走行機体の走行に伴って芝を刈り取るモーア4と、既刈り領域と未刈り領域との刈跡境界を検出する境界検出手段Qと、境界検出手段Qの検出情報に基づいて走行用の所定の制御を実行する制御手段とを備え、境界検出手段Qが、モーア4の刈刃ハウジング7における前側縦壁部7B1の前面にて芝の存否を検出するように構成されている。
(もっと読む)
自動耕作方法、及び自動耕作システム

【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
農作業車両運行管理システム
【課題】 農作業車両の運行状況を即時的に、空間的に確認することができる農作業車両運行管理システムを提供することにある。
【解決手段】 農作業車両に搭載された移動体装置から送信された位置情報を受信し、地図データベースから取得した地図データの表示画面に重ねて表示する手段を備えることを特徴とする。また、移動体装置から送信された位置情報と、地図データベースから取得した圃場データとの重なりの条件によって、表示画面に作業状況を色分け表示する手段をさらに備えることを特徴とする。また、移動体装置から送信された位置情報の日付と、地図データベースから取得した圃場データと圃場データに格納された作業予定日の比較結果に基づき、表示画面に圃場データを色分け表示する手段を備えることを特徴とする。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
作業車
【課題】直接操作又は遠隔操作で走行可能であり、この直接操作と遠隔操作とを作業状況に応じて正確に切り替えて、走行操作の操作性の向上を図ることができる作業車を提供する。
【解決手段】エンジン5の出力を走行装置に伝達する無段変速装置21と、変速ペダル16により無段変速装置21の変速比を変更する変速アクチュエータ60と、変速アクチュエータ60を遠隔操作可能なリモコン91と、リモコン91を保持可能なリモコンホルダ92と、リモコン91がリモコンホルダ92により保持されているかを検知する着脱センサ93と、着脱センサ93によりリモコン91がリモコンホルダ92に保持されていると検知された場合、変速ペダル16による直接操作を優先する制御を行い、着脱センサ93によりリモコン91がリモコンホルダ92に保持されていないと検知された場合、リモコン91による遠隔操作を優先する制御を行う制御装置80を備える田植機1。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
苗移植機
【課題】狭い領域での苗の植え付けなどの農作業を的確に行える苗移植機を提供すること。
【解決手段】電動モータ駆動式の前後輪3,4を支持する走行車体1の上方に苗供給装置16を配置し、車体1の下方に苗植付装置7を配置し、車体1を貫通して苗供給装置16と苗植付装置7をほぼ水平方向に回動自在に連結するピン12と該ピン12を回転自在に支持するバブ6を備えている苗移植機であり、狭い間隔で多量の苗を植えるネギなどの苗移植機として使用できる。
(もっと読む)
リモコン式水田用溝切機
【課題】水田用溝切機はゴム長ぐつを履いて本体を支えながら水田の中を何回も往復する作業を解決するために遠隔操作で溝切作業が出来る溝切機を提供する。
【解決手段】送信機(リモコン)1と受信機(エンジン本体)2の働きにより遠隔操作出来るようにする又 本体の直進性を高め転倒防止用に左フロート4と右フロート5を設けた溝切機である。
(もっと読む)
走行台車の操向装置
【課題】全方位移動可能であるうえに実用性に優れ、しかも狭い畝間でも走行することが可能な走行台車の操向装置を提供する。
【解決手段】タイヤ33及びタイヤホイール34からなる車輪部35と、タイヤホイール34に組み付けられて車輪部35を回転駆動するインホイールモータ36と、タイヤ33のタイヤ中心線Z1上に配置されて車輪部35を回転可能に支持する車輪フレーム37と、車輪フレーム37を支持すると共に、車輪フレーム37を軸廻りに回動させて車輪部35を操向する駆動支持部38とを備えた操向装置30を、走行台車20の四隅に配設する。
(もっと読む)
作業車両の自動走行制御装置
【課題】畝W等の走行基準体に沿ったトラクタの自動走行制御の精度を向上する。
【解決手段】トラクタ1には進行方向前側部を撮像するステレオカメラ33を設け、トラクタ1の走行動力を前後進にわたり無段変速する逆転用クラッチ18L,18R及び正転用クラッチ19L,19Rを設ける。ステレオカメラ33により畔等の走行基準体を撮像しながら走行し、走行基準体とトラクタとの検出間隔が所定間隔からずれると、所定間隔に復帰するように正転用クラッチ19L,19Rを作動して操舵制御する。またトラクタ1が所定値以上の加速度を検出すると、所定時間にわたり操舵制御を停止する。
(もっと読む)
1 - 10 / 10
[ Back to top ]