
Fターム[2B043BB03]の内容
農業機械一般(操向) (6,001) | 農業機械の作業別の種類 (591) | 耕耘装置などの土作業機 (68)
Fターム[2B043BB03]に分類される特許
1 - 20 / 68
歩行型管理機
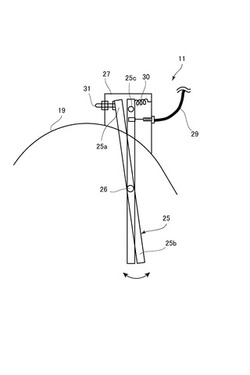
【課題】デファレンシャル機構を備えた歩行型管理機において、デフロック機構によって、旋回の開始に連動してデファレンシャル機構が機能し、旋回後、耕耘作業の開始に連動してデファレンシャル機構の機能が停止する歩行型管理機を提供する。
【解決手段】耕耘装置11に抵抗棒25を回動自在に設けて、抵抗棒25とデファレンシャル機構とを連繋し、抵抗棒25が耕耘抵抗によって回動すると、連動してデフロック機構が作用状態に切換わり、抵抗棒25が土中から出て、耕耘抵抗がなくなり元の位置に回動すると、連動してデフロック機構が非作用状態に切換わるように構成した。
(もっと読む)
歩行型管理機

【課題】主クラッチレバー及び駐車ブレーキレバーを連動させつつも、両レバーの配置の自由度を充分に確保できる歩行型管理機を提供する。
【解決手段】主クラッチ4dの「入」「切」の切替操作をする主クラッチレバー30と、ブレーキ装置11の「作動」「解除」の切替操作をする駐車ブレーキレバー50と、前記主クラッチレバー30と前記駐車ブレーキレバー50が配置されるハンドル18と、を具備する歩行型管理機において、前記主クラッチレバー30と前記駐車ブレーキレバー50とを連動ワイヤー29を介して連動連結した。
(もっと読む)
作業車両
【課題】単一のブレーキぺダルを備えた作業車両において、路上走行を安全にしながら、圃場作業時にはエンジンの回転数、ステアリングハンドルの操作位置状態から自動的に旋回走行する装置を提供する。
【解決手段】アクセルレバーにより回転数を調節できるエンジンと、該エンジンの回転数を検出するエンジン回転数センサと、ステアリングハンドルの操作状態を検出するハンドル切れ角センサとを設け、前記エンジン回転数センサが所定の作業回転数を検出し、前記ハンドル切れ角センサが最大切れ角に対して所定比率以上のハンドル切れ角を検出すると、前記ステアリングハンドルの切り側の左右ブレーキアクチュエータ24L、24Rを作動し左右ブレーキ作動手段の左右ブレーキ作動部の一方をだけを作動し片ブレーキ作動状態で旋回走行させるコントローラを設けたことを特徴とする作業車両の構成とする。
(もっと読む)
トラクタ
【課題】左右ブレーキの連結を自動的に確保し、路上走行の安全を図る。
【解決手段】走行車体に左右に並設されている左右ブレーキぺダルと、該左右ブレーキぺダルを連結状態としたりあるいは非連結状態とするブレーキ連結解除手段と、ロータリ耕耘装置を昇降回動するリフトアームと、作業モードを走行軽作業モードと耕耘重作業モードに切り換える作業切換ダイヤルと、前記リフトアームの昇降状態を検出するリフトアーム昇降センサと、前記ブレーキ連結解除手段を切換作動するブレーキ連結解除アクチュエータとを備えたトラクタにおいて、前記作業切換ダイヤルを耕耘重作業モード以外への切換状態で、前記リフトアーム昇降センサが前記リフトアームの所定高さ以上の上昇検出をすると、左右ブレーキ連結解除アクチュエータを連結作動し非連結状態にあるブレーキ連結解除手段を左右連結状態にするコントローラを設けたことを特徴とするトラクタとする。
(もっと読む)
歩行型農業作業車
【課題】差動装置を備えた歩行型農業作業車のミッションケースを小型化する。
【解決手段】差動装置20は、2つの遊星歯車機構21と、回転自在に設けられたピニオンギア22と、を有する。2つの遊星歯車機構21がそれぞれ有するサンギア23同士は、その回転軸が同一軸線上に配置される。2つの遊星歯車機構21がそれぞれ有するインターナルギア部材27は、ピニオンギア22に噛み合う。2つの遊星歯車機構21がそれぞれ有するサンギア23は、車輪用モータ19の出力軸29に固定される。そして、2つの遊星歯車機構21がそれぞれ有するプラネタリキャリア24から、それぞれ駆動力が取り出される。この構成により、車輪用モータ19の出力軸29と、差動装置20からの出力の取り出し軸(車軸9)と、を同軸に配置することができるので、車輪用モータ19から差動装置20まで駆動を伝達するための部材(チェーン等)が不要となる。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
作目印線引き用アタッチメント
【課題】畑にて作を引く時、作の開始点と終点に杭を立てて、その間に糸を引いて、糸に沿って鋤等で畑に印をつけ、その印に合わせ、耕運機を動かしながら作切りを行っていた。
【解決手段】地面に対して上下方向にのみ動作可能で、作間ピッチや線引きローラ高さも調節可能な線引き用アタッチメントを耕運機に地面に付勢するように装着させることにより作切り作業を行いながら次の作の目印となる線引きを行うことにより、糸引き作業を廃止できる。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、耕作機構419を備えた農機300に、情報処理装置100と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、農機300は、農地4について設定されたコースとコースを走行中に耕作機構419が行う農作業とを記憶し、位置標定装置411によって標定される現在位置と記憶しているコースとに基づき、農機300の操舵機構417又は動力機構418を制御してコースに沿って自律走行するとともにその走行中に耕作機構419による農作業を行うようにする。
(もっと読む)
作業車両
【課題】耕耘作業を行う作業車両の発進時に、耕耘負荷や走行負荷が大きい場合であっても、エンジン回転数の低下を抑制することができ、エンジンの停止を回避することができる作業車両を提供する。
【解決手段】走行速度を変速する無段変速機を備え、ロータリ耕耘装置を昇降可能に装着する作業車両となるトラクタであって、前記トラクタが停止し、前記ロータリ耕耘装置が接地し、かつ、前記ロータリ耕耘装置が駆動して、その後、前記トラクタが発進する場合は、その発進から規定距離X又は規定時間Tが経過するまでは、前記無段変速機の目標変速比を所定の補正率で減速側に補正するものである。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
作業車両
【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
農業機械(Aトラクター)と耕作機械の間を無線で遠隔操作をし、その動作リモコンは、自己発電自己蓄電をするワイヤーレス及びワイヤーレスリモコンであって、耕作機械においても動作電源は、自己発電自己蓄電をし、かつワイヤーレス及びコネクターレスにした装置。
【課題】
農業機械(トラクター)と耕作機械の間をケーブルレスとコネクターレスにして、かつ動作リモコンも同様にワイヤーレス、コネクターレスにしたことを提供する。
【解決手段】
動作リモコンの電源は、4−1ソーラーパネルやバイモルフモジュールから形成されて自己発電自己蓄電する1−1蓄電部と1−a操作部からの命令信号を1−2CPU部で処理をして1−iアンテナ部から1−k電波として飛ばし、B耕作機械へ取り付けられた3制御体の3−aアンテナ部へ送り、3−1RFモジュール部が3−3制御部へ命令信号に変換して、3−4耕作機械の駆動部を動作させる。
必要な電源は3−2蓄電部で自己発電自己蓄電を行い、電源を必要とする各ブロックや電子部品、電気部品に供給することによって、Aトラクター本体とB耕作機械との間をケーブルレスやコネクターレスに実現して、4制御体本体の4−4バッテリーの交換やメンテナンスフリーを実現したのである。
(もっと読む)
乗用溝切り機
【課題】駆動装置による圃場での安定走行を実現すると共に、圃場だけでなく舗装路のような道路でも乗用が可能となる画期的な乗用溝切り機を提供すること。
【解決手段】操舵する前輪1と、駆動輪となる後輪2とを乗用部3に設け、少なくとも後輪2を右後輪2Rと左後輪2Lとを有する複数輪に構成すると共に、この右後輪2Rと左後輪2Lとを、駆動装置8により回転駆動される回転駆動軸と連結して駆動するように構成し、この回転駆動軸と前記右後輪2R若しくは左後輪2Lとを連結する連結部10に、この回転駆動軸の回転を伝達する駆動連結状態と回転が伝達されないで回転自在となるフリー連結状態とに切り替える駆動・フリー切り替え機構11を設ける。
(もっと読む)
農作業機
【課題】走行中は作溝器が不用意に圃場に作溝跡を作って、圃場を荒らさないようにした農作業機を提供すること。
【解決手段】ハンドル操向角度検出センサ109によりハンドル14が所定値まで操向操作されると制御装置110により、まず作溝器用油圧シリンダ89が作溝位置にある作溝器(溝切り装置)95を非作溝位置まで上昇させ、次いで播種装置用油圧シリンダ46を作動させて作業位置にある播種装置82を非作業位置まで上昇させ、また旋回終了直前又は旋回終了を判断すると、まず播種装置82が作業位置まで下降させ、次いで作溝器95を作溝位置まで下降する作動を行わせることで、作溝器95を播種装置82より先に上昇させて、また上昇した作溝器95を播種装置82より後で圃場に降ろすことで、圃場を荒らしたり、作物を傷めたりすることを防止できる。
(もっと読む)
トラクタの旋回制御装置
【課題】枕地における斜め方向への耕耘土の跳ね飛ばしを少なくして、耕耘面の仕上がりを良好に保持することができると共に、旋回時の車速の大小に拘わらず前輪倍速装置が作動するまでに機体が走行する距離を一定とし、最適な旋回タイミングを見つけ出し易くする。
【解決手段】前輪Zが操舵されると、作業機21を上昇させると共に、前輪Zを倍速駆動させて機体の旋回を行うトラクタTの制御装置22において、前輪Zが所定の操舵角以上に操舵されたことを検出するのに伴って作業機21を上昇させる制御を開始すると共に、この上昇制御が開始された後、機体が設定距離以上に走行したことを検出するのに伴って前輪Zの倍速駆動を開始する。
(もっと読む)
旋回連動制御式の作業車両
【課題】圃場の状況や走行の状況その他の変動によって対地作業装置の再稼動前に、機体の旋回位置の修正等の異常対応操作が必要なとなった場合に、オートダウン制御の解除等の煩わしい操作を強いられることなく、異常状況の対応が可能となる旋回連動制御式の作業車両を提供する。
【解決手段】旋回連動制御式の作業車両は、作業用高さと旋回用高さに切替え可能に装荷した対地作業装置(R)と、この対地作業装置(R)について機体の旋回開始と対応して旋回用高さに切替えるオートリフト制御および旋回終了と対応して作業用高さに切替えるオートダウン制御を行う制御部(21)とを備えて構成され、上記制御部(21)は、旋回開始後における機体の位置が対地作業の所定の開始位置の範囲内であって、同じく機体の走行車速が所定速度以上である場合に限り、上記オートダウン制御を実施するものである。
(もっと読む)
農作物の倒伏防止と天日乾燥及び次期文献に記載する部材装置を稼動させる農業施設
【課題】1.作物の倒伏を防止し高収量化する。2.省労力で天日乾燥を行い高品質化する。3.耕作作業を機械から無人で稼動する装置化へ移行を図る。
【解決手段】1.構造体を設置し倒伏防止部材を取り付けることで倒伏を防止する。2.構造体を設置し天日乾燥施設とする。3.構造体を設置し部材装置を稼動させる母体施設を提供する。
(もっと読む)
作業車の制御装置
【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
1 - 20 / 68
[ Back to top ]