
Fターム[2B043BB11]の内容
農業機械一般(操向) (6,001) | 農業機械の作業別の種類 (591) | 芝又は草刈取機 (20)
Fターム[2B043BB11]に分類される特許
1 - 20 / 20
乗用型作業機
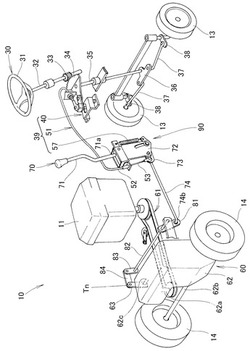
【課題】乗用型作業機の旋回時の走行速度を自動的に減速するための構成を簡略化すること。
【解決手段】ステアリングハンドル31と、エンジン11と、該エンジン11の動力を走行用の駆動輪14,14に伝達する油圧式無段変速機62と、該油圧式無段変速機62を変速操作をするようにスイング動作が可能な操作レバー71と、を備えた乗用型作業機10である。操作レバー71のスイング基部71aには、戻し機構90が設けられている。該戻し機構90は、操作レバー71によって変速操作されている油圧式無段変速機62の変速状態を、ステアリングハンドル31による旋回操舵時に減速する方向に戻す。
(もっと読む)
自走車両

【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
芝刈機
【課題】境界検出手段を支持するための支持構造を簡単なものにすることが可能でありながら、境界検出手段により既刈り領域と未刈り領域との刈跡境界を精度よく検出することが可能となる芝刈機を提供する。
【解決手段】走行駆動装置11R,11Lにより直進並びに旋回走行自在に走行駆動される走行機体の走行に伴って芝を刈り取るモーア4と、既刈り領域と未刈り領域との刈跡境界を検出する境界検出手段Qと、境界検出手段Qの検出情報に基づいて走行用の所定の制御を実行する制御手段とを備え、境界検出手段Qが、モーア4の刈刃ハウジング7における前側縦壁部7B1の前面にて芝の存否を検出するように構成されている。
(もっと読む)
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ペダル(後進アクセルペダル17及び前進アクセルペダル18)の操作量に応じて回転駆動され、ステアリングホイール16の操作量に応じて回転軸の角度が変更される車輪(前輪11a,11b及び後輪12)を備える車両であって、ペダルの操作量に基づいて目標とすべき車両の速度を算出する目標速度算出部38aと、車輪の回転軸の角度から車両の速度の制限値である車両速度制限値を設定する速度制限値設定部38bと、目標速度算出部38aの算出結果が車両速度制限値を超えている場合には、目標とすべき車両の速度を車両速度制限値に制限して車輪の回転駆動を制御するモータ制御部38cとを備える。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作量に応じて回転軸の角度が変更される後輪12を備える車両であって、車両の速度を検出する速度センサ36と、ステアリングホイール16の操作量に基づいて目標とすべき後輪12の回転軸の角度である目標操舵輪角度を算出する目標操舵輪角度算出部38aと、速度センサ36の検出結果に応じて後輪12の回転軸の角度の制限値である操舵輪角度制限値を設定する操舵輪角度制限値設定部38bと、目標操舵輪角度が操舵輪角度制限値を超えている場合には、目標操舵輪角度を操舵輪角度制限値に設定して後輪12を制御するモータ制御部38cとを備える。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
車軸駆動装置
【課題】車軸駆動装置のケースは、一対の出力軸、差動機構、モータをともに収納するので、形状が複雑である。また、上下二つのケース半部同士も共通の形状とすることができない。そのため、なおもコスト高になる。
【解決手段】車軸駆動装置10にて、両出力軸4L・4Rを収納するケース70を設け、ケース70は、略同一のケース半部の一対を、互いに上下左右反転した状態で左右に結合してなり、接合した両ケース半部は、それぞれで各出力軸4L・4R及び入力軸162を軸受しており、左右各ケース半部の外側には、それぞれ各モータ21a・22aを装着し、各モータ21a・22aのモータ軸161・160をモータ連結用継手部分に連結した。
(もっと読む)
乗用作業機
【課題】本発明は、旋回時の操作の煩わしさを排除して、旋回に係る操作性を大幅に高めることができる乗用作業機を提供することを課題とする。
【解決手段】乗用作業機としての乗用芝刈り機10は、操舵ハンドル21が所定の角度を超えて転舵されたか否かを検出する舵角センサ31を備え、車速制御レバー28が、予め定めた車速を超えた範囲に設定されたか否かを検出するレバー位置検出センサ29を備え、レバー位置検出センサ29から車速が予め定めた車速を超えた範囲に設定されているとの位置情報および舵角センサ31から舵角が所定の角度を超えた範囲に設定されているとの転舵情報の情報を受けたときにエンジン12の回転速度を絞る減速制御を実施する制御部33が設けられている。
(もっと読む)
動的限定的ステアリングフィードバック
【課題】 運転制御が容易な芝維持車、そのための動的限定的ステアリングフィードバックシステム、および芝維持車の制御方法を提供する。
【解決手段】 芝維持車用の動的限定的フィードバックシステムが、芝維持車のステアリング角および/または対地速度を検出する入力装置を含む。入力装置は、芝維持車のステアリング角および/または対地速度に相互関連する入力信号を送信する。本システムはまた、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限に影響を及ぼす出力装置を含む。本システムはさらに、入力信号を受信し、かつ入力信号に基づいて出力装置に制御信号を出力するコントローラを含み、入力信号に基づいて、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限を変化させる。芝維持車の制御方法も開示される。
(もっと読む)
作業用車両
【課題】小回り旋回をすることができるものにおいて、構造を簡素にでき、小形化できるとともに、走行装置の回転速度を滑らかに変化させて安定性よく旋回することができる作業用車両を提供する。
【解決手段】エンジン6が搭載された機体と、該機体の進行方向に対して両側に配され該機体を支持する第1及び第2の走行装置1,2と、エンジン6の回転を無段階に変速する無段変速機16と、無段変速機16が変速した回転動力を第1及び第2の走行装置1,2に伝動する第1及び第2の差動機構18,19と、一つの電動モータ21と、該電動モータ21の駆動力を、電動モータ21の伝動経路を切換えて第1又は第2の差動機構18,19に伝動する切換伝動機構22とを備え、一つの電動モータ21により小回り旋回を可能にした。
(もっと読む)
ソーラー芝刈り機
【課題】太陽電池を用いて、自動芝刈り機構における走行制御手段をコストの低いものとする。
【解決手段】減速装置4を取付けた走行モータ1を車台7に設けてなる走行機構に、刈刃と刈刃駆動モータ3と減速装置6からなる刈刃駆動機構を取り付け、磁気識別センサ11,12を当該車台前端部左右それぞれに設け、当該走行モータ端子の両端それぞれにリレーの接点を接続し、当該リレーのコイル端子と当該磁気識別センサの出力端子を接続し、当該走行モータと当該リレーを介して接続する当該磁気識別センサは当該車台左右反対位置に配置し、太陽電池を当該車台に取付け、当該リレーや当該磁気識別センサからなる走行制御機構と当該走行機構と当該刈刃駆動機構を当該太陽電池に接続し、当該走行機構と当該刈刃駆動機構並びに当該走行制御機構と当該太陽電池13を備える。当該車台を磁気を帯びたもので囲われた場所に配置する。
(もっと読む)
作業車
【課題】 旋回走行の際、前車輪に掛かった抵抗に対応した適切なタイミングで前輪変速装置が前輪増速状態に切り換え操作されるようにする。
【解決手段】 前車輪が後車輪によって押された状態になったことを検出する前輪検出手段51が非検出状態にあると、制御手段50が前輪変速装置20を標準状態に切り換え操作し、前輪変速装置20が前車輪を後車輪と同一又はほぼ同一の駆動速度で駆動する。前輪検出手段51が検出状態になると、制御手段50が前輪変速装置20を前輪増速状態に切り換え操作し、前輪変速装置20が前車輪を後車輪よりも高速で駆動する。
(もっと読む)
草刈り機
【課題】 推進力不足が発生しにくい状態で小回り旋回をすることができる草刈り機を提供する。
【解決手段】 左右の後車輪2を各別に変速駆動する一対の後輪変速装置32,32を備えてある。両後輪変速装置32の電動アクチュエータ及び操向センサ34が連係された操向制御手段33を備えてある。前車輪1が直進向きから設定角以上横向きになった横向き側操向状態に操向操作されると、操向制御手段33は、旋回内側に位置する後車輪2が旋回外側に位置する後車輪2よりも低回転速度で駆動されるように両後輪変速装置32,32を操作する。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 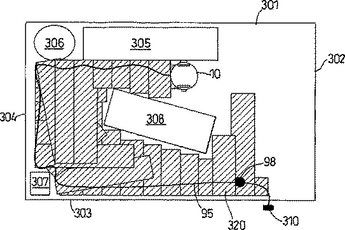 (もっと読む)
(もっと読む)
油圧式車軸駆動装置及び油圧駆動車両
【課題】左右一対の操舵輪を各別に駆動する油圧モータを一対備えた油圧式車軸駆動装置において、旋回時における油圧モータの容積変更用リンク機構を縮小して車軸駆動装置全体をコンパクトかつ配管に好適な構造にする。
【解決手段】該一対の油圧モータの少なくとも一方を固定容積型にする。この一対の油圧モータを備えた車軸駆動装置2と、油圧モータを備えたもう一つの油圧式車軸駆動装置1とを車両前後に振り分け配置した油圧駆動車両において、直進時に第一車軸駆動装置1の駆動する車輪7の周速度が第二車軸駆動装置2の駆動する車輪9の周速度と同等かそれより若干高くなるようにし、該車軸駆動装置2の油圧モータの吸入側には、両車軸駆動装置1・2の油圧モータ駆動用の油圧回路HC1に回路外から圧油を導入するためのチェックバルブ40を設ける。
(もっと読む)
作業車両の操向操作装置
【課題】車体に備えた2つのHST油圧ポンプのメンテナンス、及び左右夫れ夫れの操向レバーからトラニオン軸へ至るリンク機構の調整を容易化する。
【解決手段】油圧ポンプPL,PRと油圧モータから成る一対の静油圧式無段変速装置を備えた車両において、前記2つの油圧ポンプPL,PRを車体左右一側に変位させて前後に配置する。操縦席側方に備えた左右夫れ夫れの操向レバー3R(3L)の前後回動操作を、リンクアーム5a,5b(6a,6b)及びロッド37R,40R(37L,40L)を有する機械的連係機構を介して前記油圧ポンプPR(PL)のトラニオン軸4R(4L)へ伝達する。その際、前記左右の操向レバー3R(3L)の回動操作を伝達する中継軸5(6)を、前記2つのトラニオン軸4R(4L)を結ぶ線分X―Xに対して略中間位置C上方に設定する。
(もっと読む)
1 - 20 / 20
[ Back to top ]