
Fターム[2B043DC01]の内容
農業機械一般(操向) (6,001) | 走行装置の構成、配置又は取付け (202) | クローラ(履帯) (94)
Fターム[2B043DC01]に分類される特許
1 - 20 / 94
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記旋回量微調節手段の操作量に対応させて変更可能に構成した。旋回量微調節手段による走行機体の旋回量の調節量は、旋回量微調節手段の操作量に対応させて変更可能に構成しているため、オペレータは、旋回量微調節手段の操作量を変更することで、簡単に旋回量微調節手段による走行機体の旋回量の調節量を変更することができる。
(もっと読む)
コンバイン

【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記操向手段の操作量に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、調節量を操向手段の操作量に対応させて変更することで、操向手段による大雑把な旋回操作と旋回量微調節手段による補足的かつ微細な旋回操作を一体密接的に関連づけることができる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記走行機体の速度に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、旋回量微調節手段による走行機体の旋回量の調節量を走行機体の速度に対応させて変更可能に構成しているため、かかる調節量を走行機体の速度に対応させて変更することで、種々の状況に即応させて走行機体の曲がり具合を変更することができる。
(もっと読む)
コンバイン
【課題】電動モータを駆動源とするコンバインにおいて、従来の旋回操作方法を変更することなく、急旋回や緩旋回等の旋回を行えるようにして、圃場作業における操縦性を高める。
【解決手段】左右のクローラ走行装置(3R,3L)を変速可能な左右の電動モータ(5R,5L)で夫々駆動すると共に該クローラ走行装置(3R,3L)を制動する左右のブレーキ(6R,6L)を設け、操縦席に立設する操向レバー(21)の左右傾倒角度に応じて該操向レバー(21)を傾倒した側の電動モータ(5R又は5L)の回転速度を減速させ、操向レバー(21)の傾倒角度が設定角度に達した場合にブレーキ(6R又は6L)を作動させて傾倒側のクローラ走行装置(3R又は3L)の回転を停止させる構成とする。
(もっと読む)
水田除草ロボット
【課題】本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供する。
【解決手段】本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応すること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量を変更可能に構成した。その結果、オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させることができる。
(もっと読む)
門型たばこ栽培作業機
【課題】左右のクローラを駆動して走行する門型たばこ栽培作業機について、エンジンの回転速度の如何に関わらず、超微速で長時間安定走行させることができ、作業機の始動、停止を緩慢に、安定的に行えるように、その走行伝動機構を工夫する。
【解決手段】左右の走行フレームのいずれか一方に搭載されている動力部が互いに一体の斜板ポンプと斜板モータによる油圧減速機によるものであり、斜板ポンプをガソリンエンジンで直接駆動するようになっており、動力分配機が左右の出力スプロケットを等速で駆動する駆動手段であり、変速レバーは上記斜板ポンプを操作して上記斜板モータを変速させ、また正逆転させるものであり、上記左右のクラッチレバーは上記左右の操向クラッチを操作するものであり、左右のブレーキペダルは上記左右のブレーキを操作するものである。
(もっと読む)
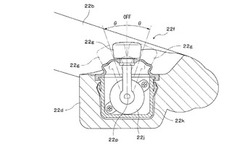
作業車の操向制御装置
【課題】トランスミッションの応答性能に拠らず、さらに、機体位置検出手段が検出不能域に存在する場合であっても、機体を、所定の進行方向から外れることなく圃場の作物に沿って自動操向させることのできる作業車の操向制御装置を提供すること。
【解決手段】機体位置検出手段16の検出値に基づいて、修正出力を出して機体が圃場の作物Mに沿うように操向操作手段22a,22bを制御する操向制御手段23aと、操向制御手段23aが修正出力の出力を開始すると、右及び左の回転数検出手段26a,26bの検出値の差を演算する演算手段23bとを備え、演算手段23bの演算値が設定値以上になると、操向制御手段23aが修正出力の出力を停止するように構成する。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する直進用及び旋回用変速機と、直進用変速機に対する直進操作具と、旋回用変速機の旋回操作具とを備えている走行車両において、操作系統の簡素化及び操作性の向上を図る。
【解決手段】互いに直交する旋回軸線及び変速軸線回りに回動可能な制御体を内蔵したステアリングボックス120を備える。旋回操作具の操作に伴う制御体の旋回軸線回りの正逆回動にて旋回用変速機54を作動させる一方、直進操作具の操作に伴う制御体の変速軸線回りの正逆回動にて直進用変速機を作動させるように構成する。ステアリングボックス120は、走行機体に設けられた操縦部9のうち走行機体1の左右中央側に位置するサイドコラム12内に配置する。
(もっと読む)
コンバイン
【課題】センサにより旋回機構の異常を検出しても、作業者が旋回機構の異常を認識しないで作業することがある。
【解決手段】コンバインは、左右の車軸51の回転に回転差を発生させて旋回する無段階に変速可能な走行装置3と、走行装置3の操向レバー75の操作位置を検出する操向レバー位置検出手段76と、前記左右の車軸51の夫々の回転数を検出する回転検出手段78とを有する。制御コントローラ79の旋回制御異常検出手段80は、検出した左右の車軸51の回転差と、前記操向レバー75の傾倒操作角度とを対比して、旋回制御異常検出手段80で旋回制御の異常を検出し、該旋回制御異常検出手段80が異常と判定すると、異常を報知手段81により報知する。
(もっと読む)
作業機等の油圧制御回路
【課題】油圧制御ブロックを小さなブロックで分離可能にしてメンテナンスの能率を高める。
【解決手段】左側走行装置の駆動と制動を左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lで制御し、右側走行装置の駆動と制動を右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rで制御する回路であって、左操向クラッチシリンダ15Lと左走行ブレーキシリンダ18Lを制御する左クラッチ切換電磁弁14Lと左パイロット圧切換電磁弁16Lと左電磁比例弁17Lを一体に組み込んだ左油圧制御ブロック35Lと、右操向クラッチシリンダ15Rと右走行ブレーキシリンダ18Rを制御する右クラッチ切換電磁弁14Rと右パイロット圧切換電磁弁16Rと右電磁比例弁17Rを一体に組み込んだ右油圧制御ブロック35Rを各別の回路にする。
(もっと読む)
作業車両の操縦装置
【課題】操向レバーの旋回操作を制御装置に入力するポジションセンサの故障をいち早く検出して警報を出したり旋回を中止することで安全性を高める。
【解決手段】操向レバー(1)の左右傾倒角度を検出するポジションセンサ(2)と、該ポジションセンサ(2)とは別に操向レバー(1)の左右傾倒状態を検出する左右の旋回スイッチ(3a,3b)を設け、前記ポジションセンサ(2)と旋回スイッチ(3a,3b)の検出値が一致しない場合を故障と判断し、警報或いは走行停止を実行する構成とした。
(もっと読む)
移植機
【課題】 移植機が、凹凸の多い走行面を走行しても、圃場に苗を精度良く植え付けることができる歩行型の移植機を提供する。
【解決手段】 走行機体の左右両側に、一端側が走行機体に支持された前輪支持アームの他端側に設けた前輪と、一端側が走行機体に支持された伝動ケースの他端側に設けたクローラ式走行装置とを備え、伝動ケースの他端側に、駆動軸と、駆動軸より下側に配置された揺動支軸とを設け、クローラ式走行装置は、駆動軸と一体回転する駆動輪と、駆動輪の下側に位置する前後のアイドラと、前後アイドラ間に位置する転輪と、駆動輪,前後アイドラ及び転輪にわたって巻き掛けられたクローラベルトと、上部が揺動支軸46に軸芯回りに揺動自在に支持され下部に前後アイドラと転輪とが支持された揺動フレームと、伝動ケースに設けた係合部に係合することで揺動フレームの揺動支軸回りの揺動を規制する牽制具とを備えてなる。
(もっと読む)
移植機
【課題】 移植機が、凹凸の多い走行面を走行しても、苗を精度良く植え付けることができる歩行型の移植機を提供する。
【解決手段】 走行体3は、走行機体9の左右両側に、左右軸回りに回転駆動される駆動軸41と、駆動軸41より下側に位置していて左右方向の軸芯を有する揺動支軸46と、畝間溝Mを走行するクローラ式走行装置18とを備え、クローラ式走行装置18は、駆動軸41と一体回転する駆動輪47と、駆動輪47より下側に位置する前後のアイドラ48,49と、前後アイドラ48,49間に位置する転輪50と、駆動輪47,前後アイドラ48,49及び転輪50にわたって巻き掛けられたクローラベルト15と、上部が揺動支軸46に揺動自在に支持され下部に前後アイドラ48,49と転輪50とが回転自在に支持された揺動フレーム51とを備え、植付体93を左右のクローラ式走行装置18の間で且つ前後方向に関して揺動支軸46の近傍に位置させる。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバイン等の走行車両において、主変速レバーと操向ハンドルとを直進用及び旋回用HST機構に連動連結するための機構を簡素化する。
【解決手段】互いに直交する2つの軸線P,S回りに回動可能な制御体131を備える。制御体131は、操向ハンドルの操作に伴う縦軸線P回りの正逆回動にて旋回用HST機構を作動させ、主変速レバーの操作に伴う横軸線S回りの正逆回動にて直進用HST機構を作動させるように構成する。制御体131の縦軸線P回りの回動量を旋回用HST機構の制御量に変換する旋回出力軸164の軸線AX2と、制御体131の横軸線S回りの回動量を直進用HST機構の制御量に変換する中間軸155の軸線とを実質的に同一平面上に位置させる。
(もっと読む)
刈取収穫機
【課題】 機体を自動操向操作により走行させながら植立茎稈の刈取作業を行うことが可能でありながら、植立茎稈の刈残し等が発生しない良好な状態で且つ能率よく刈取作業を行うことが可能となる刈取収穫機を提供する。
【解決手段】 対地位置検出手段にて求められる機体の対地位置情報に基づいて機体が作業対象領域内の設定経路に沿って走行するように、機体の向きを変更操作自在な操向操作手段29を制御する制御手段Hが備えられ、その制御手段Hが、設定経路における植立茎稈を刈り取る刈取用経路部分を走行するときに、対茎稈位置検出手段83にて検出される植立茎稈に対する機体の横幅方向の位置が刈取用の適正位置から外れると、対地位置検出手段の検出情報にかかわらず、対茎稈位置検出手段83の検出情報に基づいて機体の横幅方向の位置が適正位置になるように操向操作手段29を制御する。
(もっと読む)
コンバイン
【課題】従来のコンバインは、自動的に刈取部が地面に追従して接地可能となっていると、刈取作業を行っていない場合においてまでも、刈取部が意図せず下降する、という問題があった。
【解決手段】刈取部6が地面に接地しているか否かを検知する接地検知センサ57と、刈取部6を昇降操作する上昇・下降操作スイッチ51・52と、を備え、制御部60は、刈取作業時に、接地検知センサ57によって刈取部6が地面に接地していないことを検知すると、刈取部6が下降する自動制御モードと、刈取作業時に、上昇・下降操作スイッチ51・52の昇降操作によって刈取部6が昇降する手動制御モードと、を切替可能に備え、自動制御モードである場合に、コンバインのエンジン10から刈取部6への動力を断接する刈取クラッチ37が切状態になると、手動制御モードに切り替わる。
(もっと読む)
走行車両
【課題】旋回走行装置に旋回用操作具を連結させる出力制御機構を簡単且つ小型で、部品コスト、組付け工数、調節工数を低減できるようにした走行車両を提供する。
【解決手段】左右の走行部にて支持される走行機体と、走行機体に搭載したエンジンの動力を左右の走行部に伝達する旋回走行装置と、左右の走行部に対する旋回走行装置の旋回出力を制御する旋回用操作具を備えて成る走行車両において、旋回用操作具にて回転させる旋回入力軸122と、旋回入力軸122を中心として円周方向に延びるカム体134とを設け、円周方向に延びるカム溝134aをカム体134に形成し、旋回入力軸122を中心とする放射線方向に外向けにカム溝134aを開設し、カム溝134a内に摺動自在に嵌まる滑り子部材166により旋回走行装置54を作動制御するように構成する一方、カム溝134aの内周側幅よりもカム溝134aの外周側幅を大きく形成したものである。
(もっと読む)
走行車両
【課題】走行機体を支持する左右の走行部に動力伝達する直進走行用変速装置と,前記左右の走行部に動力を逆回転伝達する旋回走行用変速装置と,前記直進走行用変速装置の変速用操作具と,前記旋回走行用変速装置の旋回用操作具を備えて成る走行車両において,その直進及び旋回走行の操作性を簡単で小型の機構にて向上する。
【解決手段】旋回用操作具にて回転する旋回入力軸72に,変速制御体81を変速軸線Xの回りに回転自在に設けるとともに,旋回制御体82を前記変速軸線Xに直交する旋回軸線Yの回りに設けて,前記変速用操作具に連動してその各々における軸線の回りに傾き回転する構成にし,前記変速制御体に設けた円形カム81aに摺動自在に係合する変速用滑り子部材97により前記直進走行用変速装置を変速作動し,前記旋回制御体に設けた円形カム82aに摺動自在に係合する旋回用滑り子部材106により前記旋回走行用変速装置を変速作動する。
(もっと読む)
走行車両
【課題】走行機体を支持する左右の走行部に動力伝達する直進走行用変速装置の変速用操作具と,前記左右の走行部に動力を逆回転伝達する旋回走行用変速装置と旋回用操作具を備えて成る走行車両において,直進及び旋回走行の操作性を向上する。
【解決手段】旋回用操作具10にて回転する旋回入力軸72に,当該旋回入力軸を中心とする円形カム84を備えた制御体81を,前記旋回入力軸の軸線と直角に延びる直交軸線Sの回りに自在に傾き回転するように設け,この制御体を前記変速用操作具13に連動して前記直交軸線Sの回りに傾き回転するように構成し,前記円形カムのうち前記直交軸線Sと直角に延びる直線W上の部分に摺動自在に係合する変速用滑り子部材97にて前記直進走行用変速装置25を変速作動する一方,前記円形カムのうち前記直交軸線S上の部分に摺動自在に係合する旋回用滑り子部材106にて前記旋回走行用変速装置を変速作動する。
(もっと読む)
1 - 20 / 94
[ Back to top ]