
Fターム[2B043EA11]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 車両又は作業機の状態 (190)
Fターム[2B043EA11]の下位に属するFターム
走行の状態 (139)
車両又は作業機の傾斜 (12)
車両と作業機との相対位置 (37)
Fターム[2B043EA11]に分類される特許
1 - 2 / 2
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
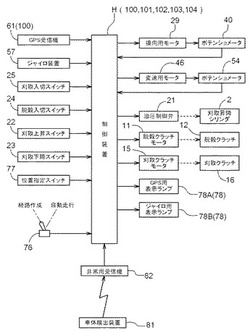
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
移植機

【課題】次回の旋回方向を正確に判断すると共に、判断した旋回方向に対応しない左右車輪の回転差を無視し、旋回開始タイミングの誤認を防止する。
【解決手段】植付部3から左右外側方に選択的に振り出され、次植付行程に走行基準線を引くマーカ9L、9Rと、走行機体1の左後輪回転及び右後輪回転に基づいて走行機体1の旋回を判断する制御装置24とを備えた移植機において、前記制御装置24は、マーカ9L、9Rの振り出し方向に基づいて次回の旋回方向を判断すると共に、判断した旋回方向に対応する左右後輪8の回転差に基づいて旋回開始を判断する。
(もっと読む)
1 - 2 / 2
[ Back to top ]