
Fターム[2B043ED30]の内容
農業機械一般(操向) (6,001) | 制御対象 (576) | その他 (5)
Fターム[2B043ED30]に分類される特許
1 - 5 / 5
乗用管理機
電動農作業車のモータ制御装置
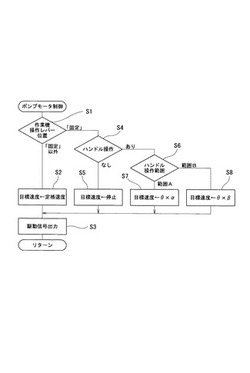
【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
(もっと読む)
薬液散布作業車両

【課題】GPSからの速度情報が気象、地形などの影響を受けて得難い場合にも車速を知ることができ、得られた車速に基づき薬液散布量が制御可能な薬液散布作業車両を提供すること。
【解決手段】位置情報と速度情報をGPSから受信できるGPS受信機81と車輪12又は13の回転数を検出する車速センサ4と薬液を吐出する防除ポンプ65による薬液吐出圧力に応じて薬液散布量を調節する防除機Bを備えており、GPSからの情報に基づき車速VG及び/又は車速センサ4による車速Vs又は車速VGと車速Vsの平均化された車速と、予め設定された単位面積当たりの薬液散布量Aとの関係から防除ポンプ65の吐出圧力を計算し、該吐出圧力計算値に一致するように薬液流量調節弁73の開度の調整をして予め設定された単位面積当たりの薬液散布量Aが均一になるように制御する制御装置100,101を備えている薬液散布作業車両である。
(もっと読む)
農業用管理システム
【課題】多数の圃場の中から正確に農作業をする圃場を識別することができるGPS衛星を利用した管理システムを提供すること。
【解決手段】農業機械10の電子制御機器11は、記録媒体16の情報を読み取ると、GPS衛星13からの電波の受信により割り出した農業機械10の圃場識別情報Aと記録媒体16から読み取った特定の圃場の位置情報Bと照合して農業機械10のモニタ12に圃場識別情報Aと特定の圃場の位置情報Bを表示させ、農業機械10が当該特定の圃場の位置に到着すると、当該特定の圃場の圃場内情報Cを表示させる機構を備えているので、特定の圃場位置情報Bに対応する圃場識別情報Aを交互に又は同時にモニタ12に表示しながら移動できるので、その地域の土地勘のないオペレータも迷うことなく前記特定の圃場に到着できる。
(もっと読む)
コンバイン
【課題】刈始めに際し、方向自動制御による操向クラッチ出力が手動操作による操向クラッチ出力に重なることを回避し、出力の重複によってオペレータの操作フィーリングが低下するという問題を解消する。
【解決手段】刈取穀稈を分草するデバイダ8と、刈取穀稈に対するデバイダ8の位置を検出する方向センサ18と、方向センサ18の検出信号に応じて機体の走行方向を自動的に制御する方向自動制御部21とを備えるコンバイン1において、方向センサ18の位置よりも下流の穀稈搬送経路で搬送穀稈を検出する搬送穀稈検出センサ(扱深メインセンサ17)を備え、該搬送穀稈検出センサのONを方向自動制御の開始条件とする。
(もっと読む)
1 - 5 / 5
[ Back to top ]