
Fターム[2B043EE01]の内容
農業機械一般(操向) (6,001) | 報知装置の構成、配置又は取付け (86) | 表示装置 (38)
Fターム[2B043EE01]に分類される特許
1 - 20 / 38
苗移植機
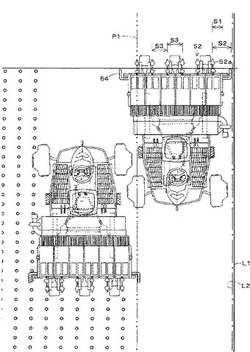
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
走行車両

【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
苗移植機
【課題】
畦際作業の際に、線引きマーカが一側に連続して作動し、畦や圃場に植え付けた苗に線引きマーカが接触することを防止可能な苗移植機を提供する。
【解決手段】
畦際での植付作業を検知する畦際検知部材76を設け、畦際検知部材76が畦際での植付作業を検知すると、苗植付部4を昇降させてもマーカ切替装置72の線引きマーカ68の作動方向を切り替えない構成とすると共に、畦際検知部材76が畦際での植付作業を検知すると線引きマーカ68の昇降回数を記憶する作動回数検知部材77を設け、作動回数検知部材77の検知回数が所定回数未満であるときは苗植付部4を昇降させてもマーカ切替装置72の作動方向を切り替えない構成とすると共に、作動回数検知部材77の検知回数が所定回数以上になると線引きマーカ68が圃場に線を形成しないようにマーカ切替装置72の作動を停止する構成とする。
(もっと読む)
農作業機のモニタパネル
【課題】
表示モニタに付着した泥土や水などを速やかに取り除くことができると共に、取り除く際に表示モニタに傷がつきにくい掃除機能付きのモニタパネルを提供する。
【解決手段】
作業機1を装着して圃場を走行しながら対地作業する車体2の操作ボード3部に、液晶モニタ4の表面を透明なモニタパネル5で被覆し、このモニタパネル5の外周部にワイパー6の両端部を摺動案内するワイパレール7、8を設け、このワイパー6をワイパレール7、8に案内させて移動することによりモニタパネル5の表面を清掃する構成とする。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
田植機
【課題】正面にポールを立設することなく、簡易な操作で苗を整列させることができる田植機を提供することを目的とする。
【解決手段】往路又は復路において、操作者がGUI151a又は151bを選択することによって、右フロントカメラ又は左フロントカメラが撮像した画像を撮像表示部151に表示させる構成とした。また既設の情報表示部と撮像表示部151とを一体化した。またいわゆるバックモニタとして撮像表示部151を使用できる構成とした。
(もっと読む)
田植機
【課題】圃場の環境に左右されることなく、進行方向と苗の並び方向とを確実に整合させることができる田植機を提供する。
【解決手段】左フロントカメラ及び右フロントカメラ21にて圃場に植え付けられた苗を撮像し、撮像された苗を表示部8に表示する。操作者は、表示部8に表示された苗の並び方向を確認して田植機を操舵し、表示部8に表示された線を最も端に位置する苗の列に一致させて、進行方向と苗の並び方向とを整合させることができる構成とした。
(もっと読む)
移植機
【課題】走行機体を左右何れに旋回させるかを示す方向指示の表示を行う左右一対の表示ランプによって、マーカの振出し状態表示や、所定状態の報知を兼用してコスト削減を図った場合であっても、オペレータや周囲の者に対して方向指示の表示を確実に視認させることのできる移植機を提供することを課題としている。
【解決手段】左右一対の表示ランプ18,27と、方向指示の操作を検出する操作検出手段47,48と、左右の表示ランプ18,27による方向指示の表示を行う制御部46とを備え、マーカ19を植付作業機8の左右に配置し、該マーカ19の振出し状態の表示を前記左右の表示ランプ18,27によって行うように前記制御部46を構成した移植機であって、表示ランプ18,27による方向指示の表示を行っている間は、表示ランプ18,27によるマーカ19の振出し状態の表示を行わないように前記制御部46を構成した。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
薬剤散布用管理作業車両
【課題】GPSセンサによって得られる機体の移動速度を散布車速として車速連動により所要の面積密度で薬剤を散布する際に、散布走行速度の検出精度について妥当性の判断を可能とする薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、GPS電波を受けて機体位置を検出するGPSセンサS2と、このGPSセンサS2によって得られた機体の移動速度であるGPS車速VGを散布車速として車速連動により散布動作する散布装置Dとを備えて単位面積当たり所定の薬液量で薬剤散布走行が可能に構成され、上記前輪3及び後輪4の走行動作を検出する車速センサS1を設け、この車速センサS1に基づいて前輪3及び後輪4の走行動作と対応する機体の計算車速Vsを算出し、この計算車速Vsと上記GPS車速VGとを区別して表示するモードを設けたものである。
(もっと読む)
農作業車両運行管理システム
【課題】 農作業車両の運行状況を即時的に、空間的に確認することができる農作業車両運行管理システムを提供することにある。
【解決手段】 農作業車両に搭載された移動体装置から送信された位置情報を受信し、地図データベースから取得した地図データの表示画面に重ねて表示する手段を備えることを特徴とする。また、移動体装置から送信された位置情報と、地図データベースから取得した圃場データとの重なりの条件によって、表示画面に作業状況を色分け表示する手段をさらに備えることを特徴とする。また、移動体装置から送信された位置情報の日付と、地図データベースから取得した圃場データと圃場データに格納された作業予定日の比較結果に基づき、表示画面に圃場データを色分け表示する手段を備えることを特徴とする。
(もっと読む)
作業車両
【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
コンバイン
【課題】穀稈の状況に応じた適切な進路を把握でき、刈取作業が行いやすくなるコンバインを提供する。
【解決手段】走行部2と、前記走行部2の前方に配置される刈取部3と、前記刈取部3の後方で前記走行部2の前部上に配置される運転部8とを備えるコンバイン1であって、前記運転部の前方を撮影する第一撮影手段12と、前記第一撮影手段12により撮影された映像を表示する表示装置85と、前記運転部8の操向操作手段(ハンドル82)の操作量に基づいて予測進路軌跡Bを作成する制御装置97とを備え、前記制御装置97は、前記予測進路軌跡Bを前記第一撮影手段12により撮影された映像に重畳させ、この予測進路軌跡Bが重畳された映像を前記表示装置85に表示させる。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
農業用管理システム
【課題】多数の圃場の中から正確に農作業をする圃場を識別することができるGPS衛星を利用した管理システムを提供すること。
【解決手段】農業機械10の電子制御機器11は、記録媒体16の情報を読み取ると、GPS衛星13からの電波の受信により割り出した農業機械10の圃場識別情報Aと記録媒体16から読み取った特定の圃場の位置情報Bと照合して農業機械10のモニタ12に圃場識別情報Aと特定の圃場の位置情報Bを表示させ、農業機械10が当該特定の圃場の位置に到着すると、当該特定の圃場の圃場内情報Cを表示させる機構を備えているので、特定の圃場位置情報Bに対応する圃場識別情報Aを交互に又は同時にモニタ12に表示しながら移動できるので、その地域の土地勘のないオペレータも迷うことなく前記特定の圃場に到着できる。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
農作業機
【課題】走行機体に動力を供給する動力源の駆動及び走行機体に連結してある作業機の作動を制御する複数の制御方法を適宜選択し、操作性及び利便性を向上させることができる農作業機を提供する。
【解決手段】耕耘機制御装置は前記作業モード切替スイッチが押下されたことを示す信号が入力され(ステップS1)該スイッチにより選択された作業モードが通常モードであるときは(ステップS2)所定のランプを点灯させて通常モードでの制御を行う(ステップS3、S4、S5)。選択された作業モードが枕地モードであるときは(ステップS6)所定のランプを点灯させて枕地モードでの制御を行う(ステップS7、S8、S9)。選択された作業モードが走行モードであるときは(ステップS6)所定のランプを消灯させて走行モードでの制御を行う(ステップS10、S11、S12)。
(もっと読む)
作業車両
【課題】音声による運転制御により安全性を高めた作業車両を提供することである。
【解決手段】音声認識装置121は、機体Tが停止している場合又はトラクタに連結した作業機Rが作動停止している場合に、これらを動作開始する操作指令がマイク122又は送受信装置120からあると、スピーカ124などで動作開始をする旨を報知した後、機体Tの走行開始出力又は作業機Rの動作出力を実施し、動いている機体Tを停止させる操作指令又は機体Tに連結した作業機Rの作動停止指令に対しては、機体Tの走行停止又は作業機Rの作動停止用の出力をした後、音声による返答を音声認識装置121を経由して返答内容(機体Tの走行停止又は作業機の作動停止の完了)を報知する構成とした。機体T又は作業機Rが間違って走行又は作動しないときなどには安全確保できる。また、それらの場合に機体T又は作業機Rが迅速に停止する側に動くため安全である。
(もっと読む)
作業車輌
【課題】複数のコントローラを、それぞれの制御対象となる操作手段又は作動手段に近接して配置した作業車輌を提供する。
【解決手段】トラクタは、主変速操作スイッチを備えた副変速レバーの下方側に、変速を制御する変速コントロールユニットC2を有し、サイドスイッチパネル18の下方部分に、作業機の昇降を制御する昇降コントロールユニットC3を有し、表示パネル15の裏側に、走行情報及び作業情報を表示する表示パネル15を制御する表示コントロールユニットC4を有し、表示パネル15の機体前方側に備えられ、これらコントロールユニットに通信回線によって接続されると共に操作レバー・スイッチや各種センサ等からの入力情報に基づいて指令信号を発する操作コントロールユニットC1を有して構成されている。これにより、各コントロールユニットと操作手段及び作動手段とを近接して配置することができる。
(もっと読む)
乗用型収穫作業機
【課題】圃場の状態に応じたきめ細かい旋回態様を選択可能な収穫作業機を提供する。
【手段】収穫作業機は走行機体の左右に配置したクローラによって走行する。左右のクローラは、直進機構と旋回機構との組み合わせによって周速度が相対的に変化し、これによって左右いずれかに旋回する。また、旋回時におけるクローラの動きは、旋回内側のクローラが逆転しないノーマルモードと、旋回内側のクローラが逆転するスピンターンモードとがある。更に、直進機構及び旋回機構はオペレータの操作によって出力を増減できる増減装置141,142を備えており、ノーマルモードにおいてもスピンターンにおいても速度を選択できる。このため、圃場の状況に応じた旋回速度を選択できる。
(もっと読む)
1 - 20 / 38
[ Back to top ]