
Fターム[2B062CA05]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | コンピュータ制御 (173)
Fターム[2B062CA05]に分類される特許
1 - 20 / 173
苗移植機
【課題】苗の補充作業等を行うときに、機体を走行させながら苗の補充を安全に行うことが、作業者の安全を確保できる苗移植機を提供すること。
【解決手段】
苗の補充作業の開始時と終了時に作業者が前記開始と終了のための手動操作する、もしくは作業者が苗の補充作業を開始したことや終了したことを自動検知する苗補充センサ57が苗補充の検知状態になると、エンジンサーボモータ47を作動させてエンジン20を低回転とする制御構成を備えた苗移植機であり、苗補充の際に停止する必要がないので作業能率が向上する。また減速段で走行することで苗の補充の際、圃場面に凹凸等があっても走行車体2の急激な揺れが発生しにくく作業者がバランスを崩して転ぶことが防げるので、苗の補充作業の安定性がより向上する。こうして、苗補充作業を行う操縦者でない作業者が苗の補充に集中することができるので、苗の補充に要する時間が短くなり、作業能率が従来技術より向上する。
(もっと読む)
作業車両

【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
苗移植機
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
乗用移植機
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
作業車
【課題】操作の煩わしさの少ない状態で燃料消費の抑制や騒音の低減を図ることが可能なものでありながら、燃料用の報知処理が誤って実行される不利を回避することが可能な作業車を提供する。
【解決手段】キースイッチがオン操作されている状態において、キースイッチ以外の他の操作具の操作に基づいてエンジンの作動を停止させるエンジン停止処理、及び、エンジンを始動させるエンジン始動処理を実行する制御装置Hが、キースイッチがオン操作されている状態において、燃料タンク30が所定の燃料貯留状態になったことを判別すると、ブザー37にて報知させる燃料用報知処理を実行し、エンジン停止処理を実行することによりエンジンの作動を停止させているときは、燃料用報知処理を実行しないように構成されている。
(もっと読む)
乗用型作業機
【課題】 旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 左右の駆動輪を備える走行車両を設け、遊転状態に切り替えた旋回内側の駆動輪の伝動軸回転数を検出し、旋回内側の駆動輪の伝動軸回転数の検出に基づいて走行距離算出手段にて走行距離を算出し、該走行距離に基づいて施肥装置の作動を自動的に行わせる制御装置を設けたことを特徴とする乗用型作業機とした。
(もっと読む)
植え付け機のための植え付け機器駆動
【課題】運転者が植え付け設定機構を改変して、苗間隔の選択の可能性を高めることができる植え付け機器駆動を備える植え付け機を提供すること。
【解決手段】植え付け機械のための植え付け機器駆動が設けられ、苗間隔制御機構が、機械後部など、変速機の外にある。1つの機構は、チェーンおよびスプロケットの苗間隔制御機構を駆動するために、変速機からの出力軸22を使用する。別の実施形態は、機械の走行速度に基づいて制御される駆動モータを使用する。電動モータまたは油圧モータのいずれかが使用されてよい。
(もっと読む)
苗移植機
【課題】旋回後に苗の植付開始位置を適切な位置に揃えることができる苗移植機を提供すること。
【解決手段】苗移植機に、旋回時又は後進時には植付部52を自動的に上昇させ、前進時には植付部52を下降させる自動昇降機構Aと、植付部52の昇降動作及び苗植付動作の入切動作を行う植付昇降レバー33と、植付部52を上昇させた状態で後進させると後輪回転センサ182により検知される後進時の回転数が予め設定された基準回転数を上回ると自動昇降機構Aを作動させない制御構成とする制御装置200を設けたので、旋回後に植付部52を下降させて苗の植え付けを再開する際に、作業者は植付昇降レバー33を手動操作して植付部52を下降させることができるので、旋回後の苗の植付開始位置を適切な位置に揃えられ、苗の植付精度が従来より向上する。
(もっと読む)
苗移植機
【課題】苗移植機による植え付け開始時において、施肥ムラが生じないようにする。
【解決手段】走行車体に設けられ、圃場に苗を植え付ける植付装置14と、苗の植え付け位置へ肥料を供給する施肥装置16と、走行操作レバー38の操作に応じて走行車体の進行方向および速度を変更する無段式変速装置33と、無段式変速装置を制御するサーボアクチュエーターと、走行操作レバーの操作に応じて施肥装置およびサーボアクチュエーターを制御する制御部50とを備える。制御部は、走行操作レバーが前進に操作されると、施肥装置を駆動し、所定時間経過後に、サーボアクチュエーターを駆動して車輪10、11および植付装置を駆動させるように制御する。
(もっと読む)
乗用型水田作業機
【課題】外部操作レバーを操作して走行機体を移動させる状況で移動を迅速に停止させ得る乗用型水田作業機を構成する。
【解決手段】ブレーキペダル26を走行機体の前部位置から操作することでブレーキ機構11を操作する外部操作レバー63を備え、この外部操作レバー63を上方に操作することでエンジン5を強制的に停止させる強制停止手段Eを備えた。
(もっと読む)
田植機
【課題】散布装置での繰り出し作動を制御するために監視すべき対象を工夫して、圃場に散布される薬剤の総散布量が少なくなるように制限し易くする。
【解決手段】横送り駆動部、及び縦送り駆動部を内装する駆動ケース14を備え、駆動ケース14の左右方向の端部から縦送り駆動軸36を突出させて縦送りアーム38を設け、往復横移動する苗のせ台20側に備えた縦送り装置21の被動アーム41を縦送りアーム38で駆動するように構成し、縦送りアーム38が作動したことを検知する縦送り検知センサ50を備え、その縦送り検知センサ50の作動に基づいて散布装置の作動を制御するように構成した。
(もっと読む)
水田作業機
【課題】変速レバーに多くの機能を与えることによって、水田作業機における操作性の向上を図る。
【解決手段】変速レバーを後進変速操作経路の中立位置Nrに操作した状態でのエンジンの回転速度と、変速レバーを後進変速操作経路の後進1速r1に対応した位置に操作した状態でのエンジンの回転速度とが同じになるように構成する。変速レバーを後進変速操作径路の最高速位置に操作した状態でのエンジンの回転速度が、変速レバーを前進変速操作径路の最高速位置に操作した状態でのエンジンの回転速度よりも小さくなるように構成する。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
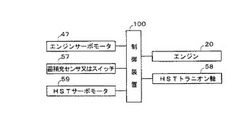
田植機
【課題】苗継ぎ作業時に、エンジンの回転数をアイドル回転数よりも低下させた場合でも、植付部を設定角度に維持することができる田植機を提供する。
【解決手段】エンジン14が搭載された走行部10の後方に植付部40を左右傾斜可能に装着した田植機1において、制御装置100は、苗継ぎ位置検出スイッチ23aのON信号を検出すると、エンジン14の回転数がアイドル回転数より低い設定回転数となるように第一アクチュエータ71を制御して、かつ、角速度センサ61の検出値Bを静止状態の検出値Bで置き換えて前記第二アクチュエータ72を制御する。
(もっと読む)
作業車両
【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
田植機
【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
田植機
【課題】従来より、エンジン駆動の田植機において、植付操作を行うマーカ選択レバー等は、大きな設置空間が必要な機械的リンク機構を介して被操作部に連動連結されるため、マーカ選択レバー等をボンネットに設けると、該ボンネット内のエンジンルームの空きスペースが小さくなり、設計自由度低下による製造コストの増加やメンテナンス性の悪化を招く、という問題があった。
【解決手段】エンジン6駆動の田植機1において、該田植機1の被操作部である植付部3、植付クラッチ33、及び線引きマーカ40L・40Rを電気制御するコントローラ46に電気信号を送受信するクロスレバー52を、前記エンジン6を収容するエンジンルーム89の直上に配置した。
(もっと読む)
走行車両
【課題】 本発明の課題は、8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】 走行車両において、ステアリング機構に連動して旋回内側の走行推進体の駆動力を断つか制動する旋回連動機構と、走行推進体の伝動軸回転数検出手段と、走行車体の旋回時に、伝動軸回転数検出手段の検出による左右の走行推進体の回転数に基づき、旋回内側の走行推進体の回転数が旋回外側の走行推進体の回転数よりも小さい該旋回外側の走行推進体の回転数の所定値以下になれば、旋回内側の走行推進体を駆動することにより、旋回内側の走行推進体を駆動する状態と旋回内側の走行推進体の駆動力を旋回連動機構により断つか制動する状態を繰り返す断続的制御を実行する制御装置を備えた。
(もっと読む)
1 - 20 / 173
[ Back to top ]