
Fターム[2B063BA21]の内容
移植機(田植機の接地部) (1,596) | 車輪 (132) | アクチュエータとの連動連結 (4)
Fターム[2B063BA21]に分類される特許
1 - 4 / 4
作業車両
【課題】簡単な構成で作業車両の姿勢変化を抑制する。
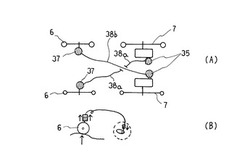
【解決手段】左右一対の前輪(6,6)及び後輪(7,7)を設けた四輪構成の作業車両であって、これら左右前輪(6,6)及び左右後輪(7,7)をそれぞれ上下動可能に支持する上下動支持機構を設け、これらの対角線上に配置されている左右前輪(6,6)、左右後輪(7,7)が互いに相反する方向に上下動させる上下動連繋手段(35,37,38)を設ける。
前記構成によると、上下動支持機構により上下動自在に支持されている左右前輪(6,6)のいずれかが上下動すると、この対角線上に配置されている左右後輪(7,7)のいずれかが上下動連繋手段(35,37,38)により互いに相反する方向に上下動し、作業車両の姿勢変化を抑えることができる。
(もっと読む)
農用作業機

【課題】 整地装置51の昇降操作と、整地装置51に対する動力伝達の入切操作とを連動させて、動力伝達の入切を同じタイミングで繰り返して確実に実行可能とすることにより、整地装置51の操作に伴う作業者の負担を軽減する。
【解決手段】 1個の操作レバー85を操作して整地装置51の昇降と整地装置51に対する動力伝達の入/切とが同時に制御される。整地装置51を上昇させて待機させる非作業状態と整地装置51を下降して接地させた作業状態との中間の高さ位置で動力伝達の入/切を切り替えることにより、整地装置51を下降させた際には、回転状態の整地装置が圃場面に接地して、速やかに正常な整地同時植え付けが開始される。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
農用作業機
【課題】 整地装置の上下操作と整地装置への動力の入切操作とを確実に行えるようにした農用作業機を提供する。
【解決手段】 走行機体11に昇降自在に支持された植付装置31と、前記走行機体11と前記植付装置31との間に配置され、かつ前記植付装置31に連動して昇降する整地装置51と、を備えた農用作業機において、前記走行機体11から前記整地装置51に動力を伝達する動力伝達装置71に介在して、動力伝達を入切するクラッチ73と、前記整地装置51を、前記植付装置31に連動した下降位置において、作業位置と非作業位置とに上下動する上下動手段61と、前記クラッチ73を入切操作すると共に、前記上下動手段61を上下操作する1個の操作手段85と、を備え、前記操作手段85は、前記クラッチ73の入操作位置にて前記上下動手段55が作業位置となるように連動させた。
(もっと読む)
1 - 4 / 4
[ Back to top ]