
Fターム[2B063CB02]の内容
移植機(田植機の接地部) (1,596) | センサー (56) | 傾斜センサー (9)
Fターム[2B063CB02]に分類される特許
1 - 9 / 9
苗移植機
【課題】
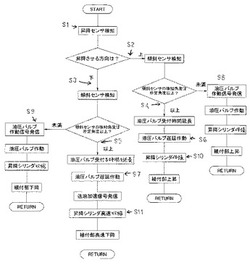
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
対地作業装置付きの苗移植機

【課題】 本発明の課題は、ロータなどの対地作業装置の作動と非作動の選択を対地作業装置高さ調節レバーの操作から独立して行うことができ、しかもこれら対地作業装置の作動と非作動の選択と対地作業装置高さ調節を簡単な構成で達成できる対地作業装置付きの苗移植機を提供することである。
【解決手段】 苗植付部(4)に対して昇降自在に設けた対地作業装置と、対地作業装置を上昇した非作業位置と下降した作業位置とに昇降するために設けた昇降操作具(84)と、該昇降操作具(84)によって行われた対地作業装置の作業位置での高さを変更調節するために設けた高さ調節操作具(81)とを備え、該高さ調節操作具(81)による対地作業装置の高さ調整を維持したまま昇降操作具(84)を操作できる構成とし、苗植付部(4)の上昇に連動して対地作業装置を非作業位置へ上昇させる構成とした対地作業装置付きの苗移植機とした。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
施肥装置付き乗用型苗移植機
【課題】本発明では、圃場面高さ検出用センサとして機能するセンターフロートに施肥用作溝器を取り付けても圃場面の凹凸を敏感に検出するようにすることが課題である。
【解決手段】走行車体の左右中央側に配置するセンターフロート52とこのセンターフロート52の左右に配置するサイドフロート53の後上部に苗植付部を設け、センターフロート52とサイドフロート53にそれぞれセンター作溝器54とサイド作溝器55を設け、センターフロート52を圃場表面検出センサとして苗植付部を昇降制御した乗用型苗移植機において、センター作溝器54の先端前傾角αをサイド作溝器55の先端前傾角βよりも小さく寝かせて設けたことを特徴とする施肥装置付き乗用型苗移植機とした。
(もっと読む)
乗用作業機
【課題】機体重量の変化の影響をあまり受けずに、圃場の凹凸や傾斜に対して、適正に機体姿勢を維持することができる乗用作業機を得ることを課題とする。
【解決手段】機体前部に操向操作される左右前輪10を設け、機体後部に左右後輪11を設けた乗用作業機において、左右前輪10は各々弾性部材81a・81bを介して機体に懸架すると共に、機体に設けた後輪ローリング軸A回りに回動自在に装着した後輪支持部材19の左右に左右後輪11を設け、機体に設けた左右傾斜センサ96の機体左右傾斜検出によって後輪支持部材19を後輪ローリング軸A回りに回動させて機体を水平に維持する左右後輪ローリング制御機構を設けた乗用作業機。
(もっと読む)
水田作業機の自動昇降制御装置
【課題】 走行機体の後部に昇降自在に連結した水田作業装置にセンサフロートを上下揺動自在に装備し、センサフロートの揺動角度を目標角度に維持するように水田作業装置を昇降制御するよう構成した水田作業機の自動昇降制御装置において、走行機体の前後傾斜を応答性良く的確に検知して、的確な目標角度補正を行い、安定した作業深さをもたらす昇降制御を実行できるようにする。
【解決手段】 走行機体に機体前後方向の角度変化を検知する角速度センサ31を設け、この角速度センサ31の検出情報に基づいてセンサフロートの目標角度θ0を自動補正する制御手段を備えてある。
(もっと読む)
農用作業機
【課題】 整地装置51を作業位置に下降させた植付作業中に走行機体が前後方向に傾斜しても、整地装置の接地状態の極端な変動を回避して、期待どおりの整地を行える農用作業機を提供する。
【解決手段】 整地装置51を昇降させる整地装置昇降シリンダ102を設け、制御部100は、傾斜センサ95の出力を読み込んで車体15の前後方向の傾斜角を求め、傾斜角に応じて整地装置昇降シリンダ102を作動させることにより、植付装置31に対する整地部52の高さ位置を刻々と調整する。そして、車体15が前上がりの場合には整地部52を水平な場合よりも少し下降させ、車体が前下がりの場合には整地部52を水平な場合よりも少し上昇させる。
(もっと読む)
農用作業機
【課題】 田畦を乗り越える際や圃場脱出時に機体15が前後方向に大きく傾斜しても、田畦や傾斜した路面への整地装置の干渉が回避されて、整地装置51が保護される農用作業機を提供する。
【解決手段】 整地装置51を昇降させる整地装置昇降シリンダ102を設け、制御部100は、傾斜センサ95の出力を読み込んで車体15の前後方向の傾斜角を刻々と判断している。そして、傾斜角が所定値を越えると、前上がり/前下がりの区別無く、また、操作レバー85の設定状態とも無関係に、整地装置昇降シリンダ102を作動させて整地装置51を非作業位置へ上昇させる。
(もっと読む)
苗移植機
【課題】圃場における適正な整地作業の実現をはかり、整地装置にかかる負荷を低減し、経済的で、作業効率の良い苗移植機を提供することである。
【解決手段】走行車体10の後ろ側にある苗植付部20は前後にピッチング動可能であり、苗植付部20の前側には整地装置22を取り付けている。更に整地装置22は苗植付部20と共に前後にピッチング動するように苗植付部20と連結して支持されている。
苗植付部20に対して整地装置22を上下動させる上下動装置23を設け、苗植付部20が前方へ傾きながらピッチング動するのに連動させて、整地装置22を上昇させる構成とした。
(もっと読む)
1 - 9 / 9
[ Back to top ]