
Fターム[2B063CB20]の内容
移植機(田植機の接地部) (1,596) | センサー (56) | その他 (11)
Fターム[2B063CB20]に分類される特許
1 - 11 / 11
作業車両
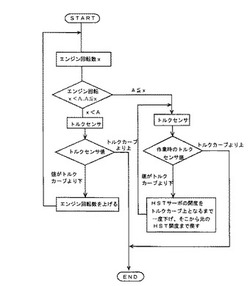
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
苗移植機

【課題】
圃場の凹凸の多少、及び苗の植付姿勢を撮影装置で撮影し、撮影された画像に合わせて苗植装置の昇降、及び植付姿勢の安定化を自動的に図る苗移植機を提供する。
【解決手段】
苗取口4を形成した苗受ガイド5に送る苗タンク6と、苗タンク6の下部に設ける圃場面を滑走するセンタフロート1とサイドフロート2と、苗取口4を下降して苗を植え付ける植付装置7を設けて苗植装置8を構成し、苗植装置8を前輪10及び後輪12を備えた走行車体14の後側に装着した苗移植機において、苗植装置8の上方位置に圃場面の凹凸を表わす画像を撮影する撮影装置17を設け、撮影装置17が撮影した画像で圃場面の凹凸の多少を判別し、圃場面の凹凸が多いときは昇降リンク16を昇降させる昇降シリンダ15の昇降制御感度を低下し、圃場面の凹凸が少ないときは昇降シリンダ15の昇降制御感度を上げる制御構成とする。
(もっと読む)
作業機
【課題】凹凸の多い荒れた圃場面を作らないようにした整地装置と苗植付装置を備えた苗移植機を提供すること。
【解決手段】 整地ロータ27a,27bを支持する平行リンク6と該平行リンク6を昇降させる整地ロータ昇降モータ7と、該昇降モータ7の作動を検知する作動検知手センサ80を苗植付部4に設け、植付部昇降操作レバー78を操作して昇降シリンダ46を作動させると、該昇降シリンダ46の作動に連動して昇降モータ7の作動検知センサ80が昇降シリンダ46を作動を検知すると昇降操作レバー78を操作して苗植付部4が昇降することにより、整地昇降モータ7が連動して動作するため、苗植付部4にある整地ロータ27a,27bの上下動を植付部昇降操作レバー78を操作するだけで行うことができるので、作業者は走行車体2の直進操作や旋回操作に集中することができ、苗の植付精度が向上する。
(もっと読む)
苗移植機
【課題】圃場の肥料残留状況に対応した一様な目標施肥濃度の肥料散布を実現することができる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行可能に支持されて圃場に苗株を植え付ける植付部(4)と、この植付部(4)の植付動作と対応してその直前位置で植付幅に及ぶ圃場面をロータ(11)の回転動作によって整地する整地装置(6)と、放出流量を調節可能に肥料を散布する施肥装置(5)とを備えて構成され、上記整地装置(6)のロータ(11)には、圃場の電気伝導率を検出する伝導率センサ(23)を設け、この伝導率センサ(23)の信号の換算によって得られる検出濃度に基づき、別途設定の目標施肥濃度に必要な散布密度によって施肥装置(5)の放出流量を制御する制御部を設けたものである。
(もっと読む)
苗移植機
【課題】 本発明の課題は、接地検出センサとして、地表面に接触することにより発生する歪、衝撃が検出できる圧電セラミックス素子を用いることによって、低コストで地表面の変化を的確に検出でき、シンプルな制御が可能な制御手段を具現することにある。
【解決手段】 本発明は、苗植付部(2)の前側に地表面を整地する整地ロータ(4)を備えてある苗移植機において、圃場の地表面に対する接触により発生する歪、衝撃が検出できる圧電セラミックスプレートからなる接触検出センサ(3)を苗植付部(2)の適所に配置して設け、該接地検出センサ(3)は、この接地面が地表面に沿うように対設すると共に、地表面の変化検出結果に基づき苗植付部の植付姿勢を自動制御する。
(もっと読む)
田植機
【課題】駆動用アクチュエータにより整地装置を駆動する田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を取り付けた田植機において、整地装置は、左右方向に伸延する回転軸と、同回転軸の外周に同心的に取り付けた整地ローターとを具備し、上記回転軸に駆動用のアクチュエータを連動連設して、同アクチュエータにより回転軸を介して整地ローターの回転速度を可変となしている。
(もっと読む)
乗用作業機
【課題】本発明では、旋回後に所定の動作を自動的に行わせる旋回連動自動制御装置を設けた乗用作業機において、旋回走行中に旋回内側の車輪が滑らないで旋回後の諸作業動作の自動制御が正確に働くようにすることが課題である。
【解決手段】乗車機体を支持する前輪と後輪の四輪を弾性支持力の調整可能な前輪サスペンション機構と後輪サスペンション機構3Sで支持すると共に前輪或は後輪の左右に旋回時の内側車軸回転数を検出する伝動軸回転数センサを設け、さらに、該前輪サスペンション機構と後輪サスペンション機構3Sの弾性支持力を制御する制御装置を設け、該制御装置で前記伝動軸回転数センサの検出回転数から算出する旋回角度が所定角度を超えると前記前輪サスペンション機構と後輪サスペンション機構3Sの旋回内側の弾性支持力を外側の弾性支持力に対して相対的に硬くなるように変更すべく制御した乗用作業機の走行安定制御とした。
(もっと読む)
作業機の走行制御装置
【課題】作業装置を付け替えた場合にも、その付け替えた作業装置に対応する適切な作業速度を維持できる作業機の走行制御装置を提供する。
【解決手段】走行速度を検出する車速センサ19と走行機体3に装着される作業装置4の種別を判別する作業装置判別用切換スイッチ21を設ける。車速センサ19が作業装置4に適応した設定速度範囲vより逸脱した走行速度Vを検出した場合には、エンジン出力速度、及び/又は、静油圧式無段変速装置10の変速操作位置を切換えて、制御手段16で設定速度範囲に復帰させるべく構成してある。
(もっと読む)
水田作業機
【課題】 水田作業機において、機体の後部に水田作業装置を昇降自在に支持した場合、機体及び水田作業装置の全長を短くする。
【解決手段】 水田作業装置に左右方向に配置された支持フレーム18の下側に、接地体9を昇降自在に支持して、支持フレーム18の上側に検出部51を備える。支持フレーム18を上下方向に貫通し上下方向に移動自在に支持された連係部材45を備えて、連係部材45の下部を接地体9に接続し、連係部材45の上部を検出部51に接続する。検出部51の検出に基づいて、水田作業装置が田面から設定高さに維持されるように、昇降機構を作動させる昇降制御手段を備える。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、苗植付装置の前部に整地装置を支持した場合、植付設定高さを変更しても(設定深さを変更しても)、田面から整地装置までの高さ(整地深さ)が変化しないように構成する。
【解決手段】 整地装置53を苗植付装置の前部に昇降自在に支持し、整地装置53を苗植付装置に対して昇降駆動するアクチュエータ56を備える。苗植付装置の植付設定高さA1の変更に基づいて、整地装置53が田面Gから整地設定高さA2に維持されるようにアクチュエータ56を作動させる。
(もっと読む)
植え付け作業機の昇降制御構造
【課題】 部品レイアウトに苦慮することなく、又、コストの高騰並びに組み付け性やメンテナンス性の低下を招くことなく、植え付け深さ調節にかかわらず、自動昇降制御において、苗植付装置を予め設定した接地高さ位置に精度良く維持できるようにする。
【解決手段】 操作手段51により、植付機構16に対する接地体17の高さ位置を変更することで植え付け深さが調節され、制御手段40が、揺動角度検出手段54で検出される接地体17の検出角度θbが予め設定した制御目標角度θoと一致するように、苗植付装置昇降用のアクチュエータ2の作動を制御することで、苗植付装置4が予め設定した接地高さ位置に維持されるように構成した植え付け作業機の昇降制御構造おいて、植え付け深さ調節に連動して、揺動角度検出手段54の検出角度θbを補正する補正手段64を備えてある。
(もっと読む)
1 - 11 / 11
[ Back to top ]