
Fターム[2B075HB13]の内容
収穫機本体(特定作物用) (1,318) | 摘み取り部 (56) | 挟み摘み方式 (3)
Fターム[2B075HB13]に分類される特許
1 - 3 / 3
収穫ロボット
【課題】 果菜類の果実の色や形状に限定されることなく、収穫適期の果実を収穫することができる収穫ロボットを提供すること。
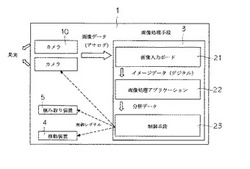
【解決手段】 果実を照明する照明装置、及び平行に設置された2台のカメラを備えた撮影手段と、摘み取り装置と、移動装置と、2台のカメラによって夫々撮影されたアナログの画像情報を取得してデジタル変換する画像入力ボード、該画像入力ボードがデジタル変換した画像情報を処理する画像処理アプリケーション、並びに、該画像処理アプリケーションにて処理された画像情報に基づいて前記撮影手段、摘み取り装置及び移動装置を制御する制御手段とを備えた画像処理手段とで構成され、前記画像処理アプリケーションは、デジタル変換されたカラー画像データをHSI値に変換して二値化し、その二値化によって絞り込んだ果実の領域から特徴量を判別することを特徴とする収穫ロボットとする。
(もっと読む)
作業車両の外部油圧取出装置

【課題】従来、農業用トラクタ等の外部油圧取出バルブは、フロア下方のシリンダケースの側面或いは上面に取り付けられていたので、バルブ自体の着脱、または配管の着脱時に窮屈な姿勢を余儀なくされ、操作性が悪かった。
【解決手段】操縦席側方のフェンダー(16)上に、ブラケット(5)を立設し、同ブラケット(5)の上部に外部油圧取出バルブ(4)を空間部(S1)を介して支持する。またバルブの周囲を、カバー部材(8)にて覆い、同カバー部材(8)の前面からバルブスプール(53)と連動連結したレバー取付アーム(7)を突設し、同アーム(7)に操作レバー(6)を取り付ける。またこの操作レバー(6)の突設方向を前方と上方に変更可能に構成する。
(もっと読む)
手に装着して果物を摘み取るための摘み取り−刈り取り具
【課題】 特に押圧の影響を受けやすい果実の収穫用に使用される、手に固定されるタイプの刈り取り具を提供する。
【解決手段】 手と指にはさみを装着することにより、収穫者は自らの指で果実の表面や茎に触れ、はさみを茎の最も望ましいカット位置に持っていくことが可能となる。カット部は、果実の表面からはみ出ないように茎をカットするよう、スプーン形状である。カット部は支持部を有し、適切な固定手段により少なくとも一本の指に固定される。親指の動きまたは外部の動力により、適切な力の伝達手段を介してカット部に力がかけられる。この摘み取り−刈り取り具は、収穫された果実が、保存時に互いに接触して傷つくことを防ぎ、果実の腐敗を抑えるのに必要最小限の長さの茎を保持することができる。
(もっと読む)
1 - 3 / 3
[ Back to top ]