
Fターム[2B075JE11]の内容
収穫機本体(特定作物用) (1,318) | 果実、野菜等の送り、収容 (89) | 果実等の収容容器 (16)
Fターム[2B075JE11]の下位に属するFターム
収容袋 (6)
Fターム[2B075JE11]に分類される特許
1 - 10 / 10
軟弱野菜収穫機
【課題】作物の根元側を挟持搬送する急傾斜状の搬送部から、後搬送部によって作物を傷めることなく引き継いで挟持搬送することができる軟弱野菜収穫機を提供する。
【解決手段】駆動プーリ45と従動プーリ43とに巻き掛けたベルト状の搬送帯10を左右に対設し、作物を下方から後方上方に向けて挟持搬送する搬送路40を形成する搬送部9を、走行装置5を有する走行機体2に傾斜姿勢で搭載する収穫機1であって、前記搬送部9の終端部で搬送帯10から、該搬送帯10より緩やかな傾斜となして葉先側を挟持して作物を引き継いで後方搬送する左右一対の後部搬送帯10a,10aを設けると共に、搬送路40に対し一方の後部搬送帯10aを他方の後部搬送帯10aより搬送上流側にずらして対設する。
(もっと読む)
軟弱野菜収穫機

【課題】収穫作業時に揺すり運動をしている容器に作物を供給することにより、作物を効率よくより多量に収容すると共に、作物の取出し作業を行い易くすることができる軟弱野菜収穫機を提供する。
【解決手段】駆動プーリ45と従動プーリ43とに巻き掛けたベルト状の搬送帯10によって、作物を下方から後方上方に向けて搬送する搬送部9を、走行装置5を有する走行機体2に後傾斜姿勢で搭載すると共に、搬送部9から搬送排出される作物を受けて収容する容器32を備えた作物収穫機において、前記容器32を走行機体2側に設けた動力駆動手段8bを介して揺動運動させ、作物を容器32内に収容可能に構成する。
(もっと読む)
果実収穫補助具
【課題】果実の収穫作業において、切り取った果実は肩掛け袋や籠などに貯め、満杯になったら運搬用籠に移す従来の作業を改善し、作業者の肉体的負担軽減と作業効率の向上のため肩掛け袋や籠に代わる果実収穫補助具を提供することを課題とする。
【解決手段】本発明の果実収穫補助具は収穫する果実の近くの枝と、地面に置いた運搬用籠aの間に、搬入口Aと搬出口Cを備えた搬送チューブBを配置し、切り取った果実を搬入口Aに入れると果実は搬送チューブB内を転がり運搬用籠aに収まる。すなわち、切り取った果実は肩掛け袋や籠などに入れて携える必要がなく直接、運搬用籠aに収まるようにする。尚、搬送チューブBの形状は、一定間隔の螺旋で構成し、搬送チューブBの終端には果実を緩やかに運搬用籠に納める構造の搬出口Cを備えた。
(もっと読む)
結球野菜収穫装置
【課題】左右に並列して多条作業が可能な小型性を保持しつつ、切断した結球部を確実にコンベアに送り込んで機体後方へと搬送可能な結球野菜収穫装置を提供する。
【解決手段】車体底部に設置した縦軸の下端に円板状の回転刃(43a、43b)を連結して、回転刃の前半部の右または左側の四半部を株元切断部となすと共に、この株元切断部に続く回転刃の後半部に後方に向け高く傾斜したスロープ(45)を設け、そして回転刃の後方に隣接して車体の長さ方向に沿うコンベア(3)を設置し、前記スロープよりコンベアの前端部に至る無端の送込みベルト(80)をスロープ及びコンベアの上方に架設し、この送込みベルトの周面には柔軟な材質で形成したラグ(81)を間隔を空けて複数形成した。
(もっと読む)
結球野菜収穫装置
【課題】簡易な構成により結球野菜の姿勢を正し、結球部を傷つけることなく外葉と確実に分離切断可能な結球野菜収穫装置を提供する。
【解決手段】車体底部に設置した縦軸の下端に円板状の回転刃(43a、43b)を連結し、当該回転刃の前半部の右または左側の四半部を株元切断部となし、この株元切断部よりも先端が前方に突き出た左右2本のディバイダーロッド(46a、46b)を株元切断部の上面に沿うように設けるとともに、これらディバイダーロッドの左右の間隔を先端に近いほど広く形成する。さらに、左右2本のディバイダーロッドのうち、株元切断部の回転方向下手側に位置するほうのディバイダーロッドの途中に株元押さえロッド(47)の前端を固定して、この株元押さえロッドを株元切断部の下面に沿うように設け、これにより当該ディバイダーロッドと株元押さえロッドの間を回転刃が通過するようにした。
(もっと読む)
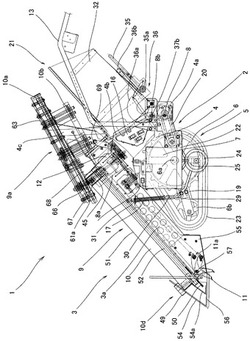
りんご、柑橘類、核果、及び同様の物体の摘み取り及び予備処理を改善する移動システム
りんご、柑橘類、核果等の摘み取り及び予備処理を改善する移動システムが、開示及び特許請求される。このシステムは、摘み取りステーション、気送管輸送サブシステム、任意選択的な物体走査サブシステム、任意選択的な不合格品転向サブシステム、任意選択的なラベリングサブシステム、及び不合格ではない物体を収納ビンに比較的丁寧に入れるサブシステムが取り付けられ得る移動シャシを備える。このシステムは、転向された物体を収納ビンに入れるサブシステムも含み得る。 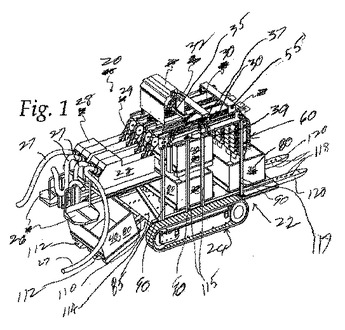 (もっと読む)
(もっと読む)
果実収穫ロボット
【課題】
狭い栽培棚間でも確実に果実を検出し、果実を傷つけることがなく、且つ簡潔な構成の果実収穫ロボットを提供することを課題とする。
【解決手段】
果実の有無及び果実までの距離を検出する検出装置37と、収穫する果実が収穫可能かどうかを識別する識別装置49と、該識別装置49の識別結果にもとづいて果実を収穫するマニピュレータ45とからなる収穫装置Bを前後左右上下方向に移動自在に設けると共に、該収穫装置Bにて収穫した果実を回収する回収部Cを設け、マニピュレータ45で収穫した果実を把持したまま収穫装置Bを回収部Cへ移動させ、マニピュレータ45で把持している果実の把持を解除して回収部Cに投入させる制御装置53を設ける構成とする。
(もっと読む)
結球野菜収穫機
【課題】本発明は、収穫後の洗浄作業などの余計な手間を要せず、所望の位置で確実に切断して収穫すると共に収穫作業の効率化を図ることができ得る簡易な構造の結球野菜収穫機を提供することを目的とする。
【解決手段】本発明の結球野菜収穫機は、走行車体に、畝に植生する結球野菜の結球部を挟扼する案内装置と、案内装置により挟扼された結球野菜を切断して結球野菜の外葉と結球部とを分離する回転刈刃を有する切断装置とを設け、前記案内装置を前記走行車体の前方で前記畝に沿って前低後高状に配置した左右の案内ロッドにより構成し、この左右の案内ロッドにより畝の頂面の直上で両案内ロッドの間が狭くなる狭隘部を形成すると共に前記回転刈刃を前記狭隘部の後下方で畝の直上に配置したことを特徴とする。
(もっと読む)
果実収穫ロボット
【課題】画像処理技術を利用して、傷つけることなく高設栽培設備における目標の果実(例えばイチゴ)を収穫できる果実収穫ロボットを提供することである。
【解決手段】下方からイチゴの画像をカメラ13で撮影し、正面からイチゴをカメラ14で撮影し、両方の画像からイチゴの三次元画像の座標位置を特定し、その際にカメラ13、14で撮影したイチゴの赤色と白色画像から着色率を判別して収穫の是非の判断をする。イチゴが収穫可能と判断されると、画像位置に合わせてマニピュレータRを作動させてイチゴを収穫するロボットである。マニピュレータRは単一でも良いし、左右一対のマニピュレータR、Rから構成して、各々独立して移動自在にしても良い。
(もっと読む)
収穫および摘果補助装置
【課題】ブルーベリーなどの収穫および適果の場合、ひとつずつ手で摘み、収穫籠に入れる作業を改善し、身体への負担を分散させる収穫および摘果補助装置を提供する。
【解決手段】取付け手段1,2を首部と手に設けることで袋状に案内手段4を設け、案内手段下部の開口部6を通じ、腰部に取付けた果実収納容器5へ果実を運ぶことで作業効率の上昇、身体への負担を分散させる
(もっと読む)
1 - 10 / 10
[ Back to top ]