
Fターム[2B076EB00]の内容
収穫機本体(機枠、駆動) (12,770) | 制御の目的、効果 (336)
Fターム[2B076EB00]の下位に属するFターム
負荷の最適化 (117)
ハンチング防止 (2)
急加減速、急発進、急停止の防止 (9)
誤操作の防止 (39)
安全性の向上、危険の防止 (163)
Fターム[2B076EB00]に分類される特許
1 - 6 / 6
コンバイン
【課題】複数顧客の各コンバインのトラブルの発生を適正に予知でき、各コンバインのメンテナンス作業性等を向上できるようにしたコンバインを提供するものである。
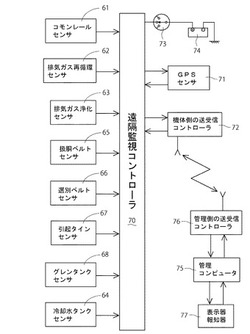
【解決手段】エンジン14を搭載した走行機体1と、扱胴226を有する脱穀装置5と、扱胴226に刈取穀稈を供給する刈取装置3を備えたコンバインにおいて、エンジン14の作動状況を検出するセンサ61,62,63,64と、脱穀装置5の作動状況を検出するセンサ65,66と、刈取装置3の作動状況を検出するセンサ67と、管理場所に設置された受信手段75に前記各センサ61〜67の検出内容を送信する送信手段72を設けたものである。
(もっと読む)
コンバイン

【課題】刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避すること。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
(もっと読む)
車速制御装置
【課題】指示速度と無段変速装置からの出力車速とを対応させるための走行テストを、狭小なコースで、かつ、テスト時間も短くて済むようにする。
【解決手段】指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3を設定する基準車速設定手段を、無段変速装置7の変速操作位置を指示速度L1,L2,L3近くの速度に相当する試験走行用の変速操作位置thに設定して車体を走行させ、その試験走行用の変速操作位置thにおける走行速度の検出結果から、指示速度L1,L2,L3に対応する変速操作位置を推定して、指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3として設定するように構成した。
(もっと読む)
コンバインの操作装置
【課題】電動モータで駆動される操作機構を利用して、刈取脱穀系のクラッチの入り切り制御に加え、刈取変速機構や穀粒搬出用クラッチの操作をも簡単に、かつ軽快に行えるようにするとともに、極力構造の簡素化も図る。
【解決手段】第1電動モータで駆動される第1操作機構8では、前記刈取クラッチ30及び脱穀クラッチ40が切り状態となる中立位置から一方向側の操作域に、脱穀クラッチ40がクラッチ入りで刈取クラッチ30がクラッチ切りである脱穀操作位置と、脱穀クラッチ40と刈取クラッチ30が共にクラッチ入りとなる刈取脱穀操作位置を設定してあり、第2電動モータで駆動される第2操作機構9では、刈取変速装置15を操作する操作域とは中立位置を挟んで反対側の操作域に、穀粒搬出用クラッチ50を入り操作する穀粒搬出位置を設定してある。
(もっと読む)
作業車の走行制御装置
【課題】 煩わしさの少ない簡単な作業で作業対象領域における自動操向制御用の設定経路を設定することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報に基づいて車体が作業対象領域内の設定経路に沿って走行するように操向手段を自動的に操作する自動操向制御を実行する制御状態と自動操向制御を実行しない非制御状態とに切り換え自在な自動操向制御手段JSが、非制御状態において経路設定モードに切り換えられると、車体が操向操作具にて操向手段が操作され且つ作業対象領域の周縁部に沿って移動するときのGPS位置情報算出手段100にて求められる複数の車体の位置情報を記憶し且つ記憶された複数の車体の位置情報に基づいて作業対象領域を特定してその特定した作業対象領域に基づいて設定経路を自動設定する経路設定処理を実行する。
(もっと読む)
作業車
【課題】直進状態と旋回状態とに切り換え自在な操向手段を備えて、直線状の作業経路に沿って走行する直進走行と前記直線状の作業経路の終端部から次回の直線状の作業経路に向けて予め定めた設定走行パターンにて走行する経路変更用走行とを繰り返す形態で作業を行う作業車に関する。
【解決手段】作業経路変更用走行を自動で行うように前記操向手段101を切り換え制御する作業行程切換制御を実行する自動旋回制御手段102と、前記作業経路変更用走行の開始を指令する手動操作式の自動旋回指令手段SWとが備えられ、前記自動旋回制御手段102が、前記自動旋回指令手段SWの指令に基づいて前記作業行程切換制御を実行するように構成する。
(もっと読む)
1 - 6 / 6
[ Back to top ]