
Fターム[2B084DJ03]の内容
収穫機の構成要素−穀稈搬送 (1,447) | 扱深さ自動制御における稈長検出位置 (14) | 搬送装置の搬送途上 (9)
Fターム[2B084DJ03]に分類される特許
1 - 9 / 9
コンバイン
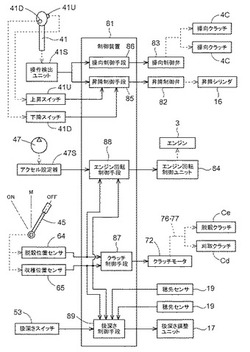
【課題】収穫作業の開始時には刈取クラッチの入り操作を確実に行い、必要に応じて脱穀クラッチのみの入り操作も可能なコンバインを構成する。
【解決手段】作業クラッチレバー45が、切り位置OFFと、脱穀作業位置Mと、収穫作業位置ONとに操作自在に構成され、この操作を検出する脱穀位置センサ64と収穫位置センサ65とを備えている。これらのセンサの検出結果から脱穀クラッチCeと刈取クラッチCdとを制御するクラッチ制御手段87を備えている。クラッチ制御手段87は、作業クラッチレバー45を切り位置OFFから収穫作業位置ONに操作する際に、脱穀作業位置Mを通過する際に脱穀クラッチCeを入り状態に設定せず、収穫作業位置ONにおいて脱穀クラッチCeと刈取クラッチCdとを入り状態に設定する。
(もっと読む)
コンバイン

【課題】穂先の扱深状態を扱深さ移動方向視認用マークによって視認し易くし、扱深さ操作方向視認マークにより扱深手動スイッチの視認操作を行い易くし、手動による扱深調整を適切に行うことができるコンバインを提供する。
【解決手段】前処理部で刈取られた穀稈を、扱深手動スイッチの浅扱ぎ側及び深扱ぎ側への操作によって扱深搬送部を作動させて扱深調整をし、脱穀入口42に適正扱深で供給搬送させるコンバインであって、前記脱穀入口42に、搬送されてくる穀稈の穂先位置に対して浅扱ぎ方向と深扱ぎ方向とを運転部7より視認可能な扱深さ移動方向視認用マーク45を表示すると共に、扱深手動スイッチには、浅扱ぎ操作状態と深扱ぎ操作状態とを扱深さ移動方向視認用マーク45と同じ態様で視認可能に表す扱深さ操作方向視認マークを表示した。
(もっと読む)
コンバイン
【課題】枕刈りや斜め刈り作業中に扱深搬送装置が深扱ぎ方向に作動制御された状態から通常の刈取り作業状態に移行する時、多量の穀稈が深扱ぎ状態で扱室に供給されて発生する脱穀不良や、脱穀された後の排藁の姿勢変動による排藁搬送装置とカッタ装置で発生する排藁の詰まり等の防止を図る。
【解決手段】刈取り穀稈の稈量を検出する稈量検出手段62a,62bを前処理部2の穀稈搬送経路中に設け、前記稈量検出手段62a,62bが少量の刈取り穀稈を検出した時は、扱深制御手段22による扱深搬送装置21の作動制御を浅扱ぎ方向にのみ実行するように構成した。
(もっと読む)
コンバイン
【課題】圃場内での枕土での回行作業時、扱深さ収納制御後において、縦搬送装置が最適な扱き位置まで戻す時間を短縮できるようにする。
【解決手段】刈取前処理装置と脱穀装置との間に配置された穀稈有無センサ122が穀稈通過なしを検出すると(S14:no) 、扱深さ制御モータを深扱側に駆動し、穀稈穂先部を深扱側に変位させる(S15) 。そして、車速Vxが予め設定されている所定の設定車速Svo より速い場合(16:no) 、「深扱側への駆動設定時間T1」が経過したか否かを判別する(S17) 。駆動設定時間T1を経過している場合(S17、yes)、縦搬送装置40の深扱側への移動停止する(S18) 。回行後、刈取前処理装置を設定された刈取高さまで下降させ、穀稈の刈取が開始される。再度、穀稈有無センサ122がONとなれば(S19、yes)、浅扱側に移動すべき時間T4を演算し(S20) 、そして、時間T4( <T1) だけ、浅扱側に扱深さ制御モータを駆動させる(S21) 。
(もっと読む)
コンバイン
【課題】センサを設けず、扱深調整搬送体の移動を機械構成上又は制御上の不都合が生じない所定範囲に規制する。
【解決手段】前処理部で刈り取られた穀稈を脱穀部に向けて扱深さ調整可能に搬送する扱深調整搬送体と、該扱深調整搬送体を浅扱ぎ方向及び深扱ぎ方向に駆動させるアクチュエータと、扱深制御を行う制御部とを備え、制御部が扱深調整搬送体をインチング駆動又は連続駆動させるコンバインにおいて、前記扱深調整搬送体が浅扱ぎ方向と深扱ぎ方向の内の一方向に所定回数以上インチング駆動又は所定時間以上連続駆動されると、それ以降、制御部が、浅扱ぎ方向と深扱ぎ方向の両方向に扱深調整搬送体をインチング駆動又は連続駆動させることが可能な通常駆動モードから所定回数以上インチング駆動又は所定時間以上連続駆動された方向に扱深調整搬送体をインチング駆動又は連続駆動させない変則駆動モードに移行する。
(もっと読む)
コンバイン
【課題】刈取作業工程の終端において扱深調節搬送装置を所定深扱位置に設定することにより、刈り終わり時に穀稈の株元寄りを挟持して稈こぼれを防止したスムーズな搬送を行うコンバインを提供する。
【解決手段】刈取穀稈を前処理部2に備えた扱深調節搬送装置55で扱深調節しながら脱穀装置に搬送供給するコンバインにおいて、前記扱深調節搬送装置55を設定スイッチの操作に基づき、現在の扱深位置を基準として所定量深扱側へ移動する構成とし、上記設定スイッチの操作により所定量深扱側へ移動したのちに、再度設定スイッチを操作しても、扱深調節搬送装置55が所定量深扱側へ移動しないように規制する規制手段を設けると共に、前処理部2に搬送穀稈を検出する搬送穀稈検出センサ70を設け、前記搬送穀稈検出センサ70がOFFからONになると、前記規制手段による規制を解除させる構成とした。
(もっと読む)
コンバイン
【課題】穀稈を刈取部から脱穀部へと搬送する際の穂先の浮き上がりを防ぎ、さらに脱穀部供給口での穀稈の滞留を防止することができるコンバインを提供する。
【解決手段】機体前部に、回動上下可能な刈取部7と、該刈取部7の後方に配置する脱穀部4とを備えるコンバインにおいて、穂先搬送装置37の後部上方に支持フレーム51を配置し、該支持フレーム51から該脱穀部供給口4a上方に穂先ガイド52を延設し、前記支持フレーム51に扱深さセンサ53を取り付け、該扱深さセンサ53よりも株元側に穂先ガイド52を取り付けた。
(もっと読む)
コンバイン
【課題】 穀稈が短稈である場合でも、また、穂先部の扱深さが浅扱きの場合でも、穀稈の搬送姿勢を良好に確保すること。
【解決手段】 刈り取られた穀稈の穂先部を係止して搬送する穂先部搬送装置と、同穀稈の株元部を挟持して搬送する縦搬送機構とにより、穀稈をフィードチェンに受け渡すようにしたコンバインにおいて、縦搬送機構の上方近傍に短稈ガイド体を配置すると共に、同短稈ガイド体は、搬送方向に伸延させて形成して、短稈である穀稈の穂先部を搬送ガイドするようにした。従って、穀稈が短稈である場合でも、また、穂先部の扱深さが浅扱きの場合でも、穀稈の搬送姿勢を良好に確保することができて、フィードチェンに穀稈を確実に受け継ぐことができる。
(もっと読む)
コンバインの刈取装置
【課題】圃場の穀稈を稈長に関らず搬送装置で確実に取り込み、穀稈のこぼれを防止する。
【解決手段】左右一対のデバイダ31・31と、該デバイダ31・31の後方に配設する左右一対の搬送装置32と、該搬送装置32の下方に配設する刈刃35とを一つの刈取ユニット20として、該刈取ユニット20を複数備えるコンバインの刈取装置において、前記搬送装置32に下搬送ケース33と該下搬送ケース33の上方に配置される上搬送ケース34とを備え、該上搬送ケース34を下搬送ケース33に対し昇降可能に構成した。
(もっと読む)
1 - 9 / 9
[ Back to top ]