
Fターム[2B084DP03]の内容
収穫機の構成要素−穀稈搬送 (1,447) | 扱深さ自動制御とその他の制御との連係 (5) | 操向制御との連係 (2)
Fターム[2B084DP03]に分類される特許
1 - 2 / 2
コンバイン
【課題】収穫作業の開始時には刈取クラッチの入り操作を確実に行い、必要に応じて脱穀クラッチのみの入り操作も可能なコンバインを構成する。
【解決手段】作業クラッチレバー45が、切り位置OFFと、脱穀作業位置Mと、収穫作業位置ONとに操作自在に構成され、この操作を検出する脱穀位置センサ64と収穫位置センサ65とを備えている。これらのセンサの検出結果から脱穀クラッチCeと刈取クラッチCdとを制御するクラッチ制御手段87を備えている。クラッチ制御手段87は、作業クラッチレバー45を切り位置OFFから収穫作業位置ONに操作する際に、脱穀作業位置Mを通過する際に脱穀クラッチCeを入り状態に設定せず、収穫作業位置ONにおいて脱穀クラッチCeと刈取クラッチCdとを入り状態に設定する。
(もっと読む)
コンバイン

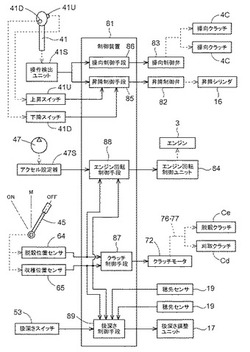
【課題】刈始めに際し、方向自動制御による操向クラッチ出力が手動操作による操向クラッチ出力に重なることを回避し、出力の重複によってオペレータの操作フィーリングが低下するという問題を解消する。
【解決手段】刈取穀稈を分草するデバイダ8と、刈取穀稈に対するデバイダ8の位置を検出する方向センサ18と、方向センサ18の検出信号に応じて機体の走行方向を自動的に制御する方向自動制御部21とを備えるコンバイン1において、方向センサ18の位置よりも下流の穀稈搬送経路で搬送穀稈を検出する搬送穀稈検出センサ(扱深メインセンサ17)を備え、該搬送穀稈検出センサのONを方向自動制御の開始条件とする。
(もっと読む)
1 - 2 / 2
[ Back to top ]