
Fターム[2C150DC01]の内容
Fターム[2C150DC01]の下位に属するFターム
組替によるもの (187)
係止部を操作 (22)
動作中に変化(動作の種類→動作形態) (58)
Fターム[2C150DC01]に分類される特許
1 - 11 / 11
作動玩具
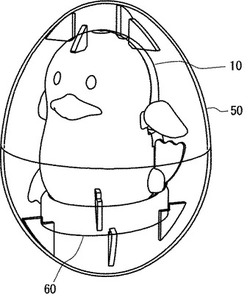
【課題】外殻体に収容した作動体が外殻体から出てくるとともに作動を開始するように形成することで、今までにない新規な玩具を提供する。
【解決手段】作動機構を備えた作動体10と、前記作動体10を内部に収容した状態で封止される外殻体50と、を備え、前記外殻体50の底部には、前記作動機構の作動を規制する作動規制部材60が設けられ、前記作動体10は、前記作動規制部材60に前記作動機構の作動を規制された状態で前記外殻体50の内部に収容され、衝撃を加えて前記外殻体50を破壊したときに、前記作動体10が前記作動規制部材60から外れ、前記作動機構が作動を開始するように形成した。
(もっと読む)
人形又は動物形象玩具用ヘアクリンパー及びそれを用いた人形又は動物形象玩具セット

【課題】 ヘアクリンパーに固定した状態の毛髪から水が蒸発し易く、波形の毛髪を迅速且つ簡便に得ることのできる実用性に富む人形又は動物形象玩具用ヘアクリンパー及びそれを用いた人形又は動物形象玩具セットを提供する。
【解決手段】 複数の凹部と凸部からなる挟着面を備えた一方の挟持部21と、前記一方の挟持部の凹部と凸部に嵌合する凹部と凸部からなる挟着面を備えた他方の挟持部22とからなり、各挟持部の挟着面は表面積に対して10%以上の通孔3を有してなり、水の適用によって変形させた状態を乾燥させることによって固定できる毛髪を備えた人形又は動物形象玩具用ヘアクリンパー1、及びそれを用いた人形又は動物形象玩具セット。
(もっと読む)
移動体搭載用のロボット及びこれを搭載した移動体
【課題】運転者を含めた全ての乗員が移動体内で快適に過ごすことができる移動体用のロボットを提供する。
【解決手段】移動体或いは乗員から受ける諸条件を認識する認識部12と、この認識部12により認識された前記諸条件に対応するための思考を行う思考部14と、前記移動体に沿って所定位置に移動するための移動部16と、思考部14による結果に基づき必要な動作を実行する動作部18とを含む、移動体搭載用のロボットにおいて、思考部14にはロボット自らが行動するための自律思考部が設定され、該自律思考部は前記認識部12が認識した前記諸条件に基づき前記移動部16及び動作部18を駆動させて自律制御を実行し、前記自律制御には、前記移動体から受ける該移動体の挙動に対して移動状態或いは停止状態のロボットの体勢を安定に保持できるように移動部16及び動作部18を駆動制御する自己保持モードを含み、自律性を備えて乗員に種々のサービスを提供する移動体用のロボット10である。
(もっと読む)
玩具用毛髪
【課題】 毛髪を水の適用により自在な形に変えることができ、水が乾燥する前に変形した状態を固定することができると共に、乾燥により変形した状態をより長期間固定でき、必要に応じて、前記変形させた毛髪を元の状態に復元させたり、別の形に変形できる繰り返しの遊戯性を備えた玩具用毛髪を提供する。
【解決手段】 50℃以下の温度で塑性変形性を有する樹脂からなる芯部と、吸水により軟化し、乾燥により硬化する樹脂からなる鞘部とから構成される芯鞘型複合繊維により形成された玩具用毛髪。
(もっと読む)
関節構造
【課題】人形、ロボット、模型等の関節において、関節の角度を任意に保持でき易いと同時に、角度を滑らかに変化させ易い関節構造を提供する。
【解決手段】球面7で接し、接する両側の部分を、中央を挿通させる弾性線材9により互いに引っ張り押圧する。この挿通された弾性線材9が保持される小さな挿通保持孔13が、前記球面7の凹側の1部と、前記球面7の凸側で球面7から等距離中心部19と、に形成される。
このため、関節の角度が変化しても弾性線材9の長さはほぼ同じである。よって、弾性線材9の長さが短くなる角度に自然に変化してしまうことがない。したがって設定角度が保持でき易い。このため、角度を維持するに摩擦を大きくする必要がなく、小さな摩擦で角度を滑らかに変化させやすい。
(もっと読む)
形態変化玩具とその形態変化玩具を収容する収容ケース
【課題】形態変化を意識して操作をしなくても玩具変化玩具を水平状態と垂直状態とを可逆的に変化させるだけで、瞬時に形態を変化させることができ、見る物に驚きと感動を与える新しい発想の形態変化玩具を提供すること。
【解決手段】内部に揺動可能に配置した錘部材10の重心移動を利用して第1の形態と第2の形態とに可逆的に形態を変化させる形態変化玩具Aであって、水平状態では第1の形態をなし、垂直状態では第2の形態をなすようにした。
(もっと読む)
人形玩具
【課題】 顔部品の係止状態を解除し開放状態にすると、両腕部と両脚部の双方が左右に広がるようにする機構を簡単な構成で実現した人形玩具の提供。
【解決手段】左腕部品7、右腕部品8の一端の軸支部7a、8aを移動部材5に、またその中間部7b、8bを胴体部11に取り付け、顔面部品2の両側部は、下方へ摺動する際に、左腕部品7、右腕部品8と当接して下方へ回動せしめ、それに伴う移動部材5の上方への移動により、その下部に設けられた左脚部品9、右脚部品10も上方へと移動し、顔面部品2が最下方に位置して係止部品14で係止されたとき、胴体部、左腕部、右腕部、左脚部、右脚部がその内部に収納されるようにする。
(もっと読む)
娯楽器具
【課題】携帯し易く、かつ、人を容易に楽しませる。
【解決手段】娯楽器具1は、基部11から先端部12が延出した形状の擬似鼻に形成された基体13からなる。基体13は弾性体からなり、この基体13の先端部12が基体13の胴部14の予め設定した位置を支点にして上方に折曲される。この基体13の構成により基体13の延出方向の寸法が縮められる(本発明でいう縮小手段)。また、基部11の端面15は、平坦に形成されている。そして、基部11側の胴部14の下面には2つ穴部16が形成され、擬似鼻の穴を形成している。
(もっと読む)
内骨格型ロボット用外装
【課題】内骨格型ロボットの外装の位置の保持や外装の自重の分散を良好に行うとともに、内部構造物の設計変更にも容易に対応可能にすることにある。
【解決手段】ロボットの機能に対応する形状のフレームを持つ内部構造物2を柔らかい素材で覆って当該ロボットの外形を任意の形状にする内骨格型ロボット用外装1において、前記内部構造物2と当接する部分の少なくとも一部を形成するパッド1d,1e,1fを、当該外装1の外部形状を形成する肉部1aの素材の発泡ウレタンフォームより反発弾性率が低い素材である低反発弾性フォームで形成することを特徴とする、内骨格型ロボット用外装である。
(もっと読む)
ロボットによる任意形状物体の把持方法
【課題】 視覚センサを有し、ロボットハンドによって任意形状物体を適切に把持することを可能とするロボットによる任意形状物体の把持方法を提供する。
【解決手段】 視覚センサで取得した画像情報を基にして把持対象物を所定の単純形状に当てはめ(ステップS1)、その大きさと向きを求め(ステップS3)、種別に応じてその単純形状の向きと大きさからロボットハンドの把持姿勢を設定する(ステップS11、21、31)。求めた把持姿勢からロボットハンドの手首位置を算出し(ステップS13)、逆運動学解析により、アーム、胴体の目標姿勢を求め(ステップS15)、モータを制御して目標姿勢を得(ステップS17)、把持を行う(ステップS19)。
(もっと読む)
ディスプレイ知育玩具
【課題】 子供の興味や関心を引き、注意力や集中力や知力を養い、乗り物などにも適するものとする。
【解決手段】 同期回転する複数の歯車36、歯車36を囲み歯車36に対向する表側を透視可能としたケース34と、歯車36に設けられた放射状の複数の突壁38、歯車36とケース34との間に装填され突壁38により転送される円盤40、歯車36の噛合部分を指向して突出し円盤40をガイドする一対の揺動可能なガイド爪42、これらガイド爪42を互いに逆方向に揺動させ連動させて円盤40を隣接する歯車36へガイドする天秤状レバー44と、を備える。
(もっと読む)
1 - 11 / 11
[ Back to top ]