
Fターム[2F069GG00]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762)
Fターム[2F069GG00]の下位に属するFターム
接触式 (619)
非接触式 (642)
電気的又は磁気的手段を利用するもの (392)
光学的手段を利用するもの (753)
波動性又は粒子性放射線を利用するもの (53)
超音波を利用するもの (124)
直接測定 (274)
間接測定 (218)
直線変位を回転変位にするもの (35)
回転変位を直線変位に変換するもの (18)
フィーラー開き角度検知型 (1)
フィーラー開き角直線変位変換型 (1)
テーパを利用するもの (2)
時間を測定するもの (29)
直線を決定するもの (3)
平面を決定するもの (7)
鉛直線を利用するもの (3)
繰り返し測定するもの (13)
速度、角速度、加速度を積分するもの (124)
ワイヤー、ロープを利用するもの (19)
マークを用いるもの (28)
測定域限定型 (1)
架橋型 (3)
尺取り式に測長するもの (1)
3点法を利用するもの (12)
内面から測定するもの (22)
外面から測定するもの (184)
型どりして測定するもの (9)
他の物理量と組み合わせるもの (49)
検出器を複数個利用するもの (279)
測定子の数 (697)
基準との比較を行うもの (136)
Fターム[2F069GG00]に分類される特許
1 - 11 / 11
建築限界測定器
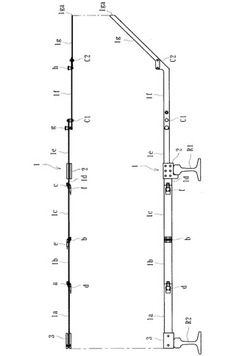
【課題】軽量化を図るとともに一対のレールに跨って載置させた際に電気的に短絡して導通してしまうのを回避することができる建築限界測定器を提供する。
【解決手段】一対のレールR1、R2上を通過する列車の建築限界Gを測定し得る建築限界測定器において、アルミ又はアルミ合金から成り、一対のレールに跨って載置されるとともに、その載置された状態で建築限界G位置まで延設した延設部1fを有する測定器本体1と、測定器本体1の一部に形成されるとともに、一方のレールR1の縁部R1aと当接可能とされ、当該当接箇所が建築限界Gを測定する際の基準点を成す基準部材2とを具備し、基準部材2は、当該基準部材2を挟んで両側に位置する測定器本体1を互いに絶縁し得る樹脂材から成るものである。
(もっと読む)
産業機械

【課題】目標位置の変化速度、及び補正に起因する追従誤差を抑制することができる制御装置を備える産業機械の提供。
【解決手段】三次元測定機1は、被測定物を測定するための測定子を移動させる移動機構2と、移動機構2を制御することで測定子の位置を位置指令値に追従させる制御装置3とを備える。制御装置3は、移動機構2にて移動される測定子の位置を検出する位置検出部31と、位置検出部31による検出位置を補正する補正部32と、補正部32にて補正された検出位置の位置指令値に対する偏差に基づいて、測定子の位置を制御する位置制御部33と、位値指令値に基づいて、移動機構2をフィードフォワード制御する位置フィードフォワード制御部34と、補正部32による検出位置の補正量に基づいて、移動機構2をフィードフォワード制御する補正量フィードフォワード制御部35とを備える。
(もっと読む)
パンチリベット接合及びクリンチングの品質特性のオンライン測定
【課題】本発明は、可動パンチ10及び固定ダイ20によるパンチリベット接合工程における膨らみ寸法xST及び長さLのリベット3のリベットヘッド端部位置KHSのオンライン測定を開示するものである。
【解決手段】接合工程中、パンチ10がとった変位及びパンチがかけた力をオンラインで測定し評価する。接合部の品質特性は、所定の閾値や接合工程の力/変位データを図面によって評価することにより測定することができる。
(もっと読む)
位置検出装置、自律移動装置、位置検出方法および位置検出プログラム
【課題】音源物体の検出成功率を向上させるとともに安定させること。
【解決手段】ロボット装置100において、画像入力部112によって入力された画像と、音源情報の適用視覚情報とに基づいて画像処理手順を実行して音源物体102の視覚特徴を検出し、音源物体102の少なくとも方位を示す視覚定位情報を出力する視覚特徴検出定位部114と、音声入力部113によって入力された音声と、音源情報の適用聴覚情報とに基づいて音声処理手順を実行して音源物体102の聴覚特徴を検出し、音源物体102の少なくとも方位を示す聴覚定位情報を出力する聴覚特徴検出定位部115と、検出戦略情報に基づいて、視覚特徴検出定位部114または聴覚特徴検出定位部115を制御し視覚定位情報または聴覚定位情報から音源物体102の存在する位置を検出する音源物体検出部116とを備えた。
(もっと読む)
走査型プローブ顕微鏡
【課題】 漏れ光の影響を受けることなく、試料の電気的物性を高精度に測定すること。
【解決手段】 先端に探針2を有するカンチレバー3と、該カンチレバー3を支持する支持部4と、カンチレバー3の変位量に応じて抵抗値が変化するピエゾ抵抗素子5とを有する自己検知型プローブ6と、ピエゾ抵抗素子5を流れる電流値を検出してカンチレバー3の変位量を検出する検出手段と、試料を載置する試料台と探針2とを、XY方向及びZ方向に相対移動させる移動手段と、探針2と試料表面との距離が一定になるように移動手段を制御すると共に試料Sの表面形状を測定する制御手段と、探針2と試料表面との間に所定の電圧を印加する印加手段と、印加された電圧に起因する電気物性情報を測定する測定手段とを備え、探針2が、カンチレバー3の基端側まで延びると共に測定手段に電気的接続可能な導電膜28に電気的に接続されている走査型プローブ顕微鏡を提供する。
(もっと読む)
表面粗さデータ解析システム
【課題】 従来の表面粗さ測定装置では、評価すべき表面粗さに関する規格に適合するかを解析することができるが、その表面粗さに関する規格以外の他の表面粗さに関する規格に適合するかを評価しようとすると、その表面粗さに関する規格に適合するかの評価試験を最初から行う必要があった。
【解決手段】 表面粗さ測定データ紙に印刷された触針の変化量のグラフを読み取る読取手段と、読取手段により読み取られた触針の変化量のグラフを測定データとして記憶する第1記憶手段と、第1記憶手段に記憶された測定データを所定の数値データに変換する数値データ変換手段と、数値データ変換手段により変換された数値データから表面粗さの解析データを算出する算出手段と、算出手段により算出された解析データを記憶する第2記憶手段と、該第2記憶手段に記憶されている解析データを出力する出力手段とを有する。
(もっと読む)
機上形状測定方法
【課題】 原器を被測定物の形状の種類分用意することなく、また、形状が異なる度に補正のための測定を行うことなく、衝となる測定機と機上形状測定機の機差を補償する。
【解決手段】 任意の設計式にて面形状を定義できる被測定物である被測定原器17を、衝となる外部形状測定機12にて測定して形状を明らかにする工程と、超精密加工用旋盤1に設置された形状測定機3にて被測定原器17を測定して形状を明らかにする工程と、外部形状測定機12により明らかにされた形状と形状測定機3により明らかにされた形状との誤差を求める工程と、誤差に基づいて加工機上に設置された形状測定機3の測定結果に補正を与える工程とを行う。
(もっと読む)
走査型プローブ顕微鏡及びそれを用いた計測方法
【課題】
探針走査機構の各駆動軸の真直誤差を低減して探針位置決め精度を向上させることによって、走査型プローブ顕微鏡の計測精度を向上させる。
【解決手段】
探針を試料表面に近接または接触させて前記試料表面を走査することにより前記試料表面の形状を計測する走査型プローブ顕微鏡において、試料を載置して少なくとも1軸方向に移動可能な試料ステージと、該試料ステージに載置された試料の表面に近接または接触させて前記試料表面を走査する探針と、該探針を3次元方向に駆動する探針駆動手段と、前記探針のたわみを検出するたわみ検出手段と、対物レンズを有して該対物レンズのほぼ光軸上に配置された前記探針及び前記試料を観察する観察手段とを備え、前記探針駆動部を、前記対物レンズの光軸に対して対称に配置された対を成す駆動源を3組備えて構成した。
(もっと読む)
走査形プローブ顕微鏡
【課題】本発明が解決しようとする問題点は、走査プローブ顕微鏡で狭域の走査をする場合における、広域走査でのスキャナ駆動回路の持つノイズやドリフトが観察像の質を悪くしていることである。
【解決手段】探針と試料との間に作用する物理量を検出する走査形プローブ顕微鏡において、探針と試料を相対的に走査するスキャナと、前記スキャナの走査領域に対応した少なくとも2個のスキャナ駆動回路と、前記少なくとも2個のスキャナ駆動回路を切り替える切替手段と、を備えた走査形プローブ顕微鏡。
(もっと読む)
建築構造物損傷検知装置
【課題】コンクリート等の構造体における地震等災害後の損傷位置や損傷程度を簡便に検知すること。
【解決手段】
構造体を構成するコンクリートに、少なくともひずみセンサと増幅回路、アナログ/デジタルコンバータ、整流・検波・変復調回路部、通信制御部を有する装置を埋設もしくは接着する。外部のリーダーから発せられた電磁波のエネルギによって該装置の電子回路を動作させ、ひずみの測定を行い、その結果をリーダーに電磁波を用いて送信する。
【効果】ひずみ測定が結線なしで非接触で行えるので、構造体の設計や施工に大きな影響を与えることなく、損傷の程度を把握する事が可能である。
(もっと読む)
マスクおよびマスクパターンの寸法測定方法
【課題】 マスクパターンの寸法を精度良く測定する。
【解決手段】 測定対象パターン11の先端部近傍に、寸法測定用の補助パターン12を形成する。この補助パターン12を基準にして測定対象パターン11のパターンエッジの位置を測定し、設計値からの変動量を測定することによって測定対象パターン11の寸法を求める。補助パターン12は、測定対象パターン11が転写されてウェーハ上に回路パターンが形成されたときに、その回路パターンの本来有すべき機能を維持させるような形状と寸法で形成されるとともに、その回路パターンの本来有すべき機能を維持させるような位置に形成される。
(もっと読む)
1 - 11 / 11
[ Back to top ]