
Fターム[2F077TT00]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069)
Fターム[2F077TT00]の下位に属するFターム
インピーダンス電気信号変換 (720)
位相検出 (164)
周波数−電圧変換 (5)
周波数検出 (24)
パルス幅検出 (34)
パルス間隔検出 (28)
デジタル−アナログ変換 (52)
デジタル−デジタル変換 (6)
パルス化、アナログ−デジタル変換 (802)
内挿、補間 (427)
方向判別 (172)
信号の特定位置の検出 (259)
原点関連 (142)
PLLを利用するもの (16)
メモリ、ROM、RAMを用いるもの (456)
シフトレジスタを用いるもの (16)
カウンタを用いる信号処理 (278)
周期差信号の処理 (64)
駆動回路、励磁回路、励振回路 (306)
電源回路 (78)
Fターム[2F077TT00]に分類される特許
1 - 20 / 20
回転角度検出装置
インダクタおよびインダクタを含む渦電流センサ
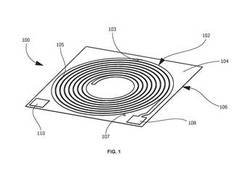
【課題】高温領域内で渦電流を感知することができるインダクタおよびインダクタを含む渦電流センサの提供。
【解決手段】インダクタ100は絶縁基板106上に配置されたパターン化金属層102を含む。パターン化金属層102は、金属材料に限定されず、任意の好適な誘導材料を含む。パターン化金属層102に好適な材料には、限定はしないが、白金、モリブデン、タングステン、タンタル、ニッケル、チタン、銅、クロム、金、アルミニウム、銀、または動作温度に適合する他の導電性材料が含まれる。インダクタ100は、約500℃(932°F)までの温度である領域の渦電流を感知することができる。
(もっと読む)
回転角検出装置およびその組み付け方法

【課題】吸気弁11の回転角の検出精度を向上する。
【解決手段】電子スロットル1を製造する工程において、信号処理回路22aは、磁気検出素子31の検出信号を補正するための補正値関数α、β、ゲイン補正値Gを算出するとともに、この算出された補正値関数α、β、ゲイン補正値Gをメモリに記憶する。信号処理回路22aは、電子制御装置40から指令を受けたときに、メモリに記憶された補正値関数α、β、ゲイン補正値Gを用いて磁気検出素子31の検出信号を補正して補正後の検出信号を算出して電子制御装置40に出力する。
(もっと読む)
半導体集積回路
【課題】低規模で、かつSN比が劣化することのない、物理量を検出する半導体集積回路を提供する。
【解決手段】増幅器6は、第1入力用スイッチトキャパシタ回路2の差動出力端子と接続される第1の差動入力端子と、第2入力用スイッチトキャパシタ回路4の差動出力端子と接続される第2の差動入力端子とを含み、第1の差動入力端子および第2の差動入力端子から入力される二対の差動信号VIP,VIN、VIP2,VIN2を加算増幅して出力する。第1の相補積分用キャパシタCF1P,CF1Nは、第1の入力用スイッチトキャパシタ回路2の差動出力端子と増幅器6の差動出力端子とに接続される。第2の相補積分用キャパシタCF2P,CF2Nは、第2の入力用スイッチトキャパシタ回路4の差動出力端子と増幅器6の差動出力端子とに接続される。
(もっと読む)
複合自己校正機能付き角度検出器
【課題】センサヘッドの個数を最少限にとどめながら、高次成分まで周波数成分の抜けがない、精度の高い校正値を得る。
【解決手段】目盛り盤の周囲に等間隔に配置される第1センサヘッドと、該第1センサヘッドの1つの位置に、第1センサヘッドに換えて配置した第2センサヘッドとからなり、第2センサヘッドと各第1センサヘッドとの計測差を求めて平均値を得ることにより自己校正を行う自己校正機能付き角度検出器において、第1センサヘッド及び第2センサヘッドを、等間隔にL個配置した第1の組と、等間隔にM個配置した第2の組で校正し、第2の組により求めた校正値を、目盛り盤に設けられた全目盛りの数をPとしたとき、j*P/L(j=1〜L−1)目盛りずつ位相をずらせ、第2の組により求めた校正値と、シフトされた校正値との平均値を求め、該平均値を第1の組により求めた校正値とを加算して校正値として出力する。
(もっと読む)
軸ぶれ計測方法及び軸ぶれ計測機能を具備した自己校正機能付き角度検出器
【課題】自己校正機能付き角度検出器に軸ぶれ計測機能をも具備させる。
【解決手段】回転軸に固定した目盛り盤の周囲に等角度間隔に複数のセンサヘッドを配設し、該センサヘッドの一つを基準センサヘッドとして選択したとき、この基準センサヘッドと他のセンサヘッドのそれぞれとの計測差の和の平均値を自己校正値とした自己校正機能付き角度検出器において、基準センサヘッドとして選択するセンサヘッドを順次他のセンサヘッドに変更し、すべてのセンサヘッドについて、これを基準ヘッドとした場合の自己校正値をそれぞれ求め、各自己校正値を、特定のセンサヘッドとの配置上の角度分だけずらして、特定のセンサヘッドを基準ヘッドとした場合の自己校正値に位相を合わせる。位相変換したそれぞれの演算結果のすべてについての平均値を求め、位相変換したそれぞれの演算結果から、この平均値を減算し、非同期角度誤差のみを取り出す。
(もっと読む)
軸の回転モーメント及び/又は回転角度を検出するための装置
【課題】低コストで構成でき、かつ信頼できる測定結果が得られ、所要構成スペースが僅かであるような装置を提供する。
【解決手段】軸の回転モーメント及び/又は回転角度を検出するための装置であって、軸に対して同心的な回路支持体1が設けられており、該回路支持体には、電流を通す少なくとも2つの導体路区分2が配置されていて、軸に対して同心的な、前記回路支持体に対して相対的に回動可能な唯1つの信号発生エレメント3が設けられており、該信号発生エレメントは、導電材料から成る第1部分領域4と、非導電材料から成る第2部分領域5とを有しており、軸に回転モーメントがかけられると、信号発生エレメントが回路支持体に対して相対的に回動し、これにより前記導体路区分と信号発生エレメントの前記第1の部分領域との間のオーバーラップ面積が変化し、導体路区分のインダクタンスが変化する。
(もっと読む)
静電容量センサ
【課題】電極のずれにより生じる誤差を修正可能な静電容量センサを提供すること。
【解決手段】可動電極12と第1の固定電極11A及び第2の固定電極11Bとの間に蓄積された静電容量を検出する静電容量センサ100において、固定電極14と第1の固定電極及び固定電極と第2の固定電極の間のそれぞれの静電容量の絶対値を検出する検出手段と、前記静電容量の絶対値の逆数に比例した値を感度にかけることにより、電極のずれにより変動した感度を補正する補正手段30と、を有することを特徴とする。
(もっと読む)
原因物理量推定方法および装置
【課題】煩雑な演算を要さずに、結果物理量yから原因物理量xを推定する。
【解決手段】原因物理量xに依存する結果物理量yを与える順方向関数y=f(x)および結果物理量yを基に近似原因物理量x’を推定する近似逆方向関数x’=g’(y)が既知であり、iを2以上の整数とするとき、測定により得られた結果物理量yに対して
x’=g’(y)
x1=2・x’−g’(f(x’))
xi=x’+xi-1−g’(f(xi-1))
により第i推定原因物理量xiを求める。
【効果】順方向関数y=f(x)の逆関数x=g(y)を用いるのではなく、近似逆方向関数x’=g’(y)を用いるので、煩雑な演算を要さずに、結果物理量yから原因物理量xを推定することが出来る。
(もっと読む)
MEMSシステムにおいて低周波エラーを除去する方法及びシステム
MEMSシステムを含む電子システムにおける低周波エラーを除去するためのシステム及び方法を以下に説明する。システムは1つ又は複数のスイッチに結合される第1の回路を備える。1つ又は複数のボンディングワイヤがスイッチ及び第2の回路に結合される。制御信号がスイッチに結合され、該制御信号は、第1の回路の、第2の回路への結合をスイッチを介して制御して、第1の回路の出力における、ボンディングワイヤによって引き起こされる変動オフセットを除去するように構成される。 (もっと読む)
磁気検出装置
【課題】誤検出することなく磁性移動体の移動方向を検出することができる磁気検出装置を得る。
【解決手段】被検出対象の正方向への移動に基づく、第1磁電変化出力回路の出力と第2磁電変化出力回路の出力の相互の位相により、第1信号を出力し、ハイレベル1とローレベル1のパルスを発生し、被検出対象の逆方向への移動に基づく、第1磁電変化出力回路の出力と第2磁電変化出力回路の出力の相互の位相により、第2信号を出力し、ハイレベル2とローレベル2のパルスを発生する出力信号処理回路を備え、ハイレベル1とローレベル1のパルスが他方の比較レベルと交差しないようにすると共に、ハイレベル2とローレベル2のパルスが一方の比較レベルと交差しないようにする。
(もっと読む)
磁気検出装置
【課題】歯状磁性体の位置及び移動方向を正確に検出できる磁気検出装置を得る。
【解決手段】移動方向判定手段13から得られる歯状磁性体の移動方向に基づき、第1信号について歯状磁性体の各歯における所定位置に対応する部分を磁性体位置として判定する磁性体位置判定手段14と、磁性体位置判定手段14から得られる磁性体位置と移動方向判定手段13から得られる歯状磁性体の移動方向の情報を含む移動状態信号を出力する移動状態出力手段15とを備え、移動状態信号は、3レベルの信号であり、レベルが変化する際のエッジ及びそのエッジにおける変化後レベルに、磁性体位置及び移動方向情報が対応している。
(もっと読む)
レゾルバを用いて回転体の回転位置を検出するための装置
【課題】レゾルバを用い、より良好な精度で、回転位置を検出する。
【解決手段】回転体に接続された二相出力方式のレゾルバを用いて、該回転体の回転位置を検出するための装置であって、時間を計測する時間計測手段と、レゾルバから、回転位置を示す回転位置データを取得する取得手段と、レゾルバの回転速度が一定のときに、該計測手段によって特定された複数の時点において取得手段により取得された回転位置データに基づいて、補正パラメータを算出する補正パラメータ算出手段と、任意の時点において取得手段により取得された回転位置データを、該補正パラメータによって補正する補正手段と、を備える。ここで、補正パラメータは、レゾルバが任意の回転速度で回転している時に取得された任意の値の回転位置データ、および該レゾルバの回転が停止している時に取得された任意の値の回転位置データに適用可能なように算出される。
(もっと読む)
静電容量変化検出回路及び半導体装置
【課題】静電容量型センサが形成された半導体チップとその容量変化を検出する検出回路が形成された半導体チップとからなるハイブリッドICにおいて、両チップ間に必要なボンディングワイヤーの数を減らす。
【解決手段】センサチップ50の裏面を、それが載置された支持基板の表面の電極に接続し、センサのキャパシタCmの一方端子Ncbを基準電位に設定する。センサチップ50の表面には他方端子Ncdのパッドを形成する。検出回路チップ52には、Cmとの接続端子Ndとなるパッドと、Ndに接続され、Cmを充電するバイアス電圧を出力するバイアス回路54と、NdにキャパシタCcを介して接続され、Cmの端子Ncdの電位変化を電気信号として検出する検出回路56とが形成される。両チップ50,52は端子Ndのパッドと端子Ncdのパッドとの間のボンディングワイヤーで接続される。
(もっと読む)
回転駆動装置
【課題】 回転体の回転速度の検出のための構成を簡略化する。
【解決手段】 回転体1の回転中心にモータ2の回転軸3が、回転軸3には回転体1とモータ2との間に円盤状のエンコーダ4がそれぞれ設けられており、モータ2の回転によって回転体1とエンコーダ4とを同時に同速度で回転させる。エンコーダ4上には、複数のスケール5が回転軸3を中心に環状に配設されており、検出部6がエンコーダ4の回転時にエンコーダ4上の各スケール5に対して光源から光を照射し、各スケール5を透過した透過光をセンサによって検出したときの検出信号を制御部7へ出力し、制御部7は、回転体1の回転中は検出部6からの検出信号に基づいてエンコーダ4の取り付け偏心量を検出し、その検出した取り付け偏心量を補正することによって回転体1を所定の回転速度で回転させ、モータ2の回転数を調整して回転体1の回転速度を制御する。
(もっと読む)
シャフト型リニアモータの位置検出装置
【課題】 シャフト型リニアモータの位置決め制御システムにおける大幅なコストダウンを可能にし、シャフト型リニアモータの用途を飛躍的に拡張することができるだけでなく、シャフト型リニアモータにおける位置検出装置の一体化を容易にし、コンパクト化が求められる分野での利用を促進する。
【解決手段】 複数の棒状磁石が直列状に配列されたシャフト2と、該シャフト2にスライド自在に外嵌する可動子3とを備え、該可動子3の内部に設けられるコイルの励磁により、可動子3を直線的に駆動させるシャフト型リニアモータ1の位置検出装置4であって、可動子3に、シャフト2の磁束を検出する磁気センサSを設けると共に、該磁気センサSの検出信号に基づいて可動子3の位置を推定する。
(もっと読む)
回転入力装置の使用方法
【課題】特別な切替操作を必要とせずに、回転入力装置に多機能を割り振ることを可能とする回転入力装置の使用方法を提案すること。
【解決手段】回転入力機構を備えた入力装置であって、回転入力操作時に最初に操作が行われた位置を検出する機能を備えた回転入力装置において、予め360度の入力方向を区切って複数の領域を設定するとともに、それぞれの領域に異なる操作対象を設定しておき、前記回転入力操作が行われた場合には、最初に操作が行われた位置がどの領域に該当するかを判別し、この選択された領域に応じた操作対象に対して、その後連続して入力される回転入力操作を反映させるようにした。
(もっと読む)
位置検出装置
【課題】被測定物の位置制御のため信号処理回路を改良する。
【解決手段】本位置検出装置1は、被測定物10が所定位置に移動したことを出力信号のレベルの変化として出力する絶対位置検出センサ2と、被測定物10の移動量を出力信号のパルス数で出力する相対位置検出センサ3と、絶対位置検出センサ2の出力信号である絶対位置検出信号と、相対位置検出センサ3の出力信号である相対位置検出信号とから一の出力信号を複合位置検出信号として生成する信号処理部4と、を有する。位置検出装置1は、複合位置検出信号が所定レベル以上又は以下に変化した位置を基点に該複合位置検出信号のパルス数を計測することにより、被測定物10の所定位置からの相対距離を検出する。
(もっと読む)
回転角度検出センサーの故障検出装置
【課題】ポジションセンサーのスタック故障等の故障をより確実に検出するとともに、この故障検出の制御をより的確に行う。
【解決手段】ホールICからなる第1および第2IC4a,4bのセンサー電圧値の合計と正常時の第1および第2IC4a,4bのセンサー電圧値の合計との差の絶対値が、隣接するレンジ間のレンジ間幅に基づいて設定された規定値と比較判断される。そして、この差の絶対値が、規定値より大きくなったときに第1および第2IC4a,4bの故障が検出される。これにより、第1および第2IC4a,4bのスタック故障等の故障を確実に検出することができる。
(もっと読む)
特性値調整装置
【課題】 複数の特性値を調整する際の操作の煩雑さを低減することにより、操作性を向上させることができる特性値調整装置を提供すること。
【解決手段】 スイッチ22が押下されると、モード設定部24は、音質調整モードに設定し、その旨をパラメータ選択部26に通知する。パラメータ選択部26は、操作リング20の表面に取り付けられた複数のタッチセンサの出力に基づいて操作時の操作位置を検出し、この操作位置に対応して音質調整モード設定時における4つの調整対象パラメータのいずれかを選択する。選択された調整対象パラメータに対応して、左右バランス設定部32、前後バランス設定部34、低音設定部36、高音設定部38のいずれかは、角度検出部28による検出結果に応じて、調整対象パラメータの調整量を設定する。
(もっと読む)
1 - 20 / 20
[ Back to top ]