
Fターム[2F101BF00]の内容
電気機械時計 (5,466) | ステップモータを有する時計の付加機能 (48)
Fターム[2F101BF00]の下位に属するFターム
Fターム[2F101BF00]に分類される特許
1 - 20 / 34
アナログ電子時計
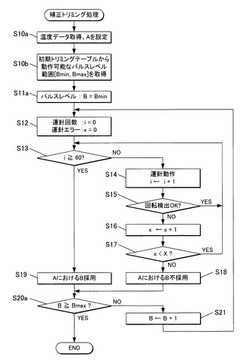
【課題】製品ごとに無駄なく最適な運針を行わせることが可能なアナログ電子時計を提供する。
【解決手段】指針と、駆動パルスに基づく指針の駆動手段と、駆動パルスのパルス幅を制御する駆動制御手段と、パルス幅の設定可能範囲と駆動手段の動作特性の変化に係る物理量との対応関係を示す初期テーブルを記憶する第1記憶手段と、物理量の計測手段と、計測された物理量とその状態での駆動手段の動特性とに基づき初期テーブルの補正データを作成する補正手段と、作成された補正データを記憶する第2記憶手段とを備え、駆動制御手段は、計測された物理量に対応する補正データが第2記憶手段に記憶されている場合には、補正データからパルス幅の設定可能範囲を取得し、第2記憶手段に記憶されていない場合には、初期テーブルからパルス幅の設定可能範囲を取得し、各々設定可能範囲内の駆動パルスを出力する。
(もっと読む)
モータ駆動装置及びアナログ電子時計

【課題】モータを駆動するときの状態が誤動作を起こしやすい所定状態のときでも適切な駆動パルスによって駆動できるようにする。
【解決手段】少なくともモータ6、7の駆動電力を供給する2次電池2と、モータ6、7を駆動するときの状態が所定状態か否かを検出する状態検出手段と、前記状態検出手段による検出結果に応じた間隔で2次電池2の電圧を検出する電池電圧検出部10と、相互にエネルギが異なる複数種類の駆動パルスの中から電池電圧検出部10の検出結果に応じたエネルギの駆動パルスを選択してモータ6、7を駆動する制御手段とを備えて成り、電池電圧検出部10は、前記状態検出手段が、モータ6、7を駆動するときの状態が前記所定状態であることを検出したときは、前記所定状態でないことを検出したときよりも短い間隔で2次電池2の電圧を検出する。
(もっと読む)
電子時計
【課題】運針していない場合においても、蓄電部の性能を劣化させることなく、蓄電部の過充電を防止することができる。
【解決手段】発電部11は、受光面に照射される光に応じた電力を発電する。蓄電部13は、発電部11が発電した電力を蓄電し、蓄電した電力を出力する。電圧検出部40は、蓄電部13が出力する電力の電圧を検出する。処理部50は計時を行う。クロノグラフ指針は、処理部50が計時した時間を指し示し、計時の停止中は機構によって固定される。第2駆動回路62は、蓄電部13が出力する電力を用いてクロノグラフ指針を駆動する。処理部50は、蓄電部13が出力する電力の電圧が所定の閾値以上である場合、第2駆動回路62を駆動させる。
(もっと読む)
多針付電子機器
【課題】機器全体を小型化・薄型化することのできる多針付電子機器を提供する。
【解決手段】歯車支持基板10の表側と裏側とに配置される第1の小歯車134a、第2の小歯車134bを備える第2の中間車134と、歯車支持基板10の下側で第2の中間車134と噛み合い、第3のモータ131の回転運動を第2の中間車134に伝達する第1の中間車133と、歯車支持基板10の表側で第2の中間車134の第2の小歯車134bと噛み合い、第1の中間車133によって伝達された第3のモータ131の回転運動を時針13側に伝える第4の中間車135とを備えている。
(もっと読む)
多針付電子機器
【課題】機器全体を小型化・薄型化することのできる多針付電子機器を提供する。
【解決手段】複数の針のうち、時針輪列機構によって第3のモータ131の回転運動を伝達される時針13の直近に位置する時針用筒車137及び機能針輪列機構によって第4のモータ141の回転運動を伝達される機能針14の直近に位置する機能針用筒車147を歯車支持基板10の表側に配置し、秒針輪列機構を構成する歯車のうち少なくとも秒針11の直近に位置する四番車114及び分針輪列機構を構成する歯車のうち少なくとも分針12の直近に位置する二番車125を歯車支持基板10の裏側に配置した。
(もっと読む)
電子時計
【課題】デモ運針において指針の位置がずれた場合、利用者が指針の位置ずれを修正する際の操作負担を軽減すること。
【解決手段】外部からの操作に応じた操作信号に基づき第1の方向に回転する指針と、前記第1の方向と逆の第2の方向および前記第1の方向に前記指針を回転させるデモ運針において、予め決められている基準位置から前記第1の方向への回転角度が前記基準位置から前記第2の方向への回転角度よりも小さくなる位置に前記指針を位置させるように前記デモ運針を行う制御部とを備えることを特徴とする。
(もっと読む)
情報表示装置
【課題】環境センサや発電手段などを使用せず、時計の携帯状態を判断し有効な節電手段を提供する低コストな電子時計を提供する。
【解決手段】電子時計1は、時計に加わった衝撃や加速度を、時刻表示指針8の慣性によりステップモータ7から発生する逆起電力によって検出する衝撃検出回路6を備え、衝撃検出回路6の衝撃検出結果によって時計の携帯状態を判断し、時計が長時間非携帯状態にあると判断した場合に指針の駆動を停止する節電状態とする。
(もっと読む)
アナログ電子時計
【課題】指針の移動方向を切り替えて回転させる場合に、歯車のバックラッシュがあっても駆動開始の際に速やかに指針の移動を開始させることのできるアナログ電子時計を提供する。
【解決手段】正転および逆転可能なステッピングモータと、指針と、ステッピングモータの運動を指針に伝達する複数の歯車とを備え、指針を時計回りおよび反時計回りに移動させることのできるアナログ電子時計である。そして、指針を移動させた後、指針の次の移動方向が前回の移動方向と異なっている場合(ステップS34の“YES”)に、指針の次の移動要求が生じるタイミングより前に、ステッピングモータを指針の次の移動方向に対応する回転方向に駆動する補正パルスを供給する補正パルス供給手段(ステップS37〜S39)を備えている。
(もっと読む)
電子時計およびその処理方法とプログラム
【課題】クロノグラフ機能を備えた時計等、複数の針と当該針をそれぞれ運針させる複数のモータとを備えた電子時計において、指針の運針のムラを除去することのできる電子時計を提供する。
【解決手段】クロノグラフ針の駆動タイミング信号を出力した際に読み取った内部カウンタがカウントした値と、カウント値記憶部に予め記憶されているカウント値とを比較して一致する場合に、時刻針の駆動タイミング信号とクロノグラフ針の駆動タイミング信号が重なると判定し、時刻針の駆動タイミングを遅らせるか早めるかの何れかの処理を行う。
(もっと読む)
クロノグラフ時計
【課題】クロノグラフ針が機械的に帰零され電気的に駆動されるクロノグラフ時計において、クロノグラフ針が機械的にロックした状態で電気的に駆動されないようにすること。
【解決手段】機械的に帰零されるクロノグラフ時計において、クロノグラフ針を駆動するクロノモータと、操作手段のスタート操作に応答した時間計測動作により前記クロノモータを駆動する駆動手段と、前記駆動手段を制御する制御手段とを有し、前記制御手段は、クロノモータ108の回転状況を検出する回転検出回路109を有し、クロノモータ108を所定時間駆動した後、回転検出回路109がクロノモータ108は非回転であることを検出した場合には、前記駆動手段によるクロノモータ108の駆動を停止し、時間計測動作をリセットする。
(もっと読む)
アナログ電子時計
【課題】 複数の指針を所定位置まで早送りする場合に、容易な制御で短時間に複数の指針の早送り運針を完了することのできるアナログ電子時計を提供する。
【解決手段】 各指針を個別に運針させる場合に最も短い時間で移動できる各指針の移動方向、駆動速度および移動量をそれぞれ求める第1の算出手段(S2〜S7)と、第1の算出手段により算出された各指針の駆動速度のうち最も遅い最遅駆動速度を抽出する最遅速度抽出手段(S8〜S11)と、移動方向が正方向、移動量が180度の回転移動量より大きいと算出された指針を特定指針として抽出し、最遅駆動速度が当該特定指針の逆方向最速駆動速度以下か否かを判別する判別手段(S15,S16)と、この判別手段により以下と判別された場合に、当該特定指針の移動方向を逆方向と修正する第2の算出手段(S17,S18)とを備えている。
(もっと読む)
時計
【課題】不安定な指針の挙動が視認されることを回避できるとともに消費電力を低減することができる時計を提供する。
【解決手段】電波時計1は、秒針を駆動するステップモータ7と、ステップモータ7に駆動パルスを供給すると共に駆動パルスの駆動エネルギーを変更可能な制御部4と、周囲の照度を検出する照度センサ60と、を備え、制御部4は、検出された照度が所定の閾値以下に変化した場合に、ステップモータ7に供給する駆動パルスを駆動エネルギーが小さくなるように変更する。
(もっと読む)
クロノグラフ時計
【課題】クロノグラフ針が電気的に駆動制御され機械的に帰零制御されるタイプのクロノグラフ時計において、時間計測動作の電気的なスタートと機械的な解除のタイミングがずれて計測誤差が発生するのを防止すること。
【解決手段】クロノグラフ針が電気的に駆動制御され機械的に帰零制御されるタイプのクロノグラフ時計において、クロノグラフ針運針用モータ35の回転状況を検出する回転検出回路55と、スタート/ストップボタン18のスタート操作から所定時間内に回転検出回路55が、クロノグラフ針運針用モータ35が回転しなかったことを検出した駆動回数を計数する非回転補正制御部61とを備え、前記スタート操作に応答してクロノグラフ針運針用モータ35の駆動を開始した後、スタート/ストップボタン18のストップ操作に応答してクロノグラフ針運針用モータ35の駆動を停止するまでの間に、非回転補正制御部61が計数した駆動回数分を加えて駆動する。
(もっと読む)
ステッピングモータ制御回路及びアナログ電子時計
【課題】複数のステッピングモータを用いて駆動する場合に、回転検出回路の構成を大規模にすることなく、各ステッピングモータ共通の負荷に応じた駆動パルスによって駆動とすることにより、省電力化を図ること。
【解決手段】時刻針114、115、116を駆動する時刻モータ112と、クロノグラフ針117、118、113を駆動するクロノモータ111と、時刻モータ112の非駆動時に発生する信号に基づいて負荷状況を検出する負荷検出回路107と、負荷検出回路107が検出した負荷状況に応じて、時刻モータ112及びクロノモータ111の駆動パルスを変更して駆動する制御手段とを備えている。
(もっと読む)
ステッピングモータ制御回路及びアナログ電子時計
【課題】レトログラード運針を行うアナログ電子時計において、正転駆動から逆転駆動への切替え時に運針異常が生じないようにすること。
【解決手段】クロノグラフ指針を駆動するステッピングモータ102と、ステッピングモータ102の駆動を正転駆動と逆転駆動に切替駆動することによって前記クロノグラフ指針をレトログラード運針する制御手段とを備え、前記制御手段は、ステッピングモータ102の駆動を正転駆動から逆転駆動に切り替える際の切替間隔を調整する。
(もっと読む)
クロノグラフ時計
【課題】クロノグラフ機能の使用時間が少ない場合でも、電池信頼性寿命時間の超過を防止して、漏液によるクロノグラフ時計の故障発生を防ぐこと。
【解決手段】24時間カウンタ111は経過した時間を24時間からダウンカウントし、クロノカウンタ112は所定時間からクロノ計測動作を行った時間をダウンカウントし、処理部106は、24時間カウンタ111とクロノカウンタ112のカウント値が等しくなったとき、カウンタ111、112の残り時間の間、電池電力消耗手段103によって電池113を消耗させる。
(もっと読む)
クロノグラフ時計
【課題】クロノ駆動タイミングと磁界検出タイミングが重なって不必要に補正駆動パルスによって駆動されるのを防止すること。
【解決手段】処理部108は、計時した計時情報、計測したクロノ計測情報に各々基づいて所定タイミングで時刻表示モータ110、クロノ表示モータ114を駆動するように駆動回路109、113を制御すると共に所定タイミングで磁界検出手段112が磁界を検出するように制御し、クロノ表示モータ114の駆動タイミングと磁界検出手段112の磁界検出タイミングが重なった場合、クロノ表示モータ114の駆動タイミングと磁界検出手段112の磁界検出タイミングが重ならないように磁界検出手段112の磁界検出タイミングを変更する。
(もっと読む)
クロノグラフ時計
【課題】モータ駆動中にクロノ計測動作をリセットして再スタート時の最初の駆動時に非回転となることを防止すること。
【解決手段】駆動制御部51は、リセットボタン19のリセット操作がモータ35駆動中に行われて回転検出回路55が非回転を検出した場合、駆動パルス発生回路52が出力するモータ駆動パルスGの極性を反転せずに終了し、スタート/ストップボタン18のスタート操作に応答して前回リセット時と同極性の駆動パルスUによってモータ35を駆動するように駆動パルス発生回路52を制御し、リセット後の再スタート時に前記同極性の駆動パルスUによってモータ35を駆動する。
(もっと読む)
クロノグラフ時計
【課題】クロノグラフ針の回転に対する機械的な規正が解除される前に、クロノグラフ針駆動用のモータが電気的に駆動されて正確な運針が妨げられるのを防ぎ得るようにしたクロノグラフ時計を提供すること。
【解決手段】同相駆動制御部61は、スタート/ストップボタン18による時間計測開始指示に応答して、最初の駆動パルスに代えて前記駆動パルスよりも駆動時間が長い初期駆動パルスUによってステッピングモータ35を駆動するように、所定時間幅の同相制御信号Ps1を駆動パルス発生回路52に出力する。駆動パルス発生回路52は、同相で複数の主駆動パルスを含むモータ駆動信号Uによってステッピングモータ35を回転駆動する。ステッピングモータ35はモータ駆動信号U中のいずれかの主駆動駆動パルスによって回転駆動され、クロノグラフ針を14、15を回転駆動する。
(もっと読む)
電波時計
【課題】電波受信機能とモータ駆動用機能とを備えているにもかかわらず、コンパクトで高密度な実装が可能な電波時計を得ること。
【解決手段】電波受信機能とモータ駆動用機能とを兼用した兼用コイル12bを備えた電磁構造体DK、使用者の操作によりスイッチ動作されるスイッチ部13、受信回路6、モータ駆動回路10b、このモータ駆動回路10bにより駆動される被駆動体Sを備えている。電波受信の際は、スイッチ部13の操作により兼用コイル12bを受信回路6に接続し、この接続された兼用コイル12bにより電波を受信するように制御する一方で、この電波受信が終了した後は兼用コイル12bをモータ駆動回路10bに接続し、この接続された兼用コイル12bによりモータ駆動回路10bを動作させて、被駆動体Sを駆動するようにCPU2により制御する。
(もっと読む)
1 - 20 / 34
[ Back to top ]