
Fターム[2F129AA20]の内容
航行(Navigation) (246,646) | 航行体 (14,848) | その他 (51)
Fターム[2F129AA20]に分類される特許
1 - 20 / 51
ルート探索装置およびルート探索方法
ナビゲーション装置および電子ベル制御方法
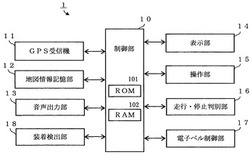
【課題】ナビゲーション装置に警報機能を持たせるとともに、走行中のユーザに対して最低限の簡単な操作方法を提供して警報機能の操作を許可するようにしたナビゲーション装置を提供する。
【解決手段】ナビゲーション装置1が自転車に装着されたことを検出する装着検出部18と、前記自転車が走行中であることを検出する走行・停止判別部16と、警報または警報メッセージを音声データとして予め記憶した記憶部102と、音声出力部13から前記警報または警報メッセージを出力するよう制御する電子ベル制御部17と、を備え、前記走行・停止判別部16が、前記自転車が走行中であると判別した場合、前記タッチパネルのタッチ操作を検出すると、前記電子ベル制御部17は音声出力部13から前記警報または警報メッセージを出力するよう制御する。
(もっと読む)
特徴の配置のための位置制御システム
【課題】 作業位置の間を自発的に往来することが可能な作業機械の位置を決定する作業機械に使用するシステムを提供する。
【解決手段】 本体を備える作業機械と、本体に連結されるコンピューティングシステムと、本体から延びる器具であって、作業機械が位置する作業場所の地面を変更するために構成される、器具と、本体に連結されコンピューティングシステムと通信する測位システムであって、コンピューティングシステムが作業機械の位置および作業機械の配向を決定するようにコンピューティングシステムに渡されるデータを提供する、測位システムと、コンピューティングシステムに電気的に連結されてメモリに格納されるソフトウェアと、を含む。
(もっと読む)
待ち合わせ場所提示装置及び待ち合わせ場所提示方法

【課題】待ち合わせ場所の選択の際の指標を提示可能とする。
【解決手段】複数の車両の走行情報であるプローブ情報を参照して待ち合わせ場所を抽出して、抽出した待ち合わせ場所の情報を要求元に提示情報として送信する。また、上記抽出した待ち合わせ場所の少なくとも1つの待ち合わせ場所に係る映像データを上記要求元に送信する。
(もっと読む)
情報処理システム、情報処理装置およびプログラム
【課題】店舗側および客の双方にとって使い勝手の良い経路検索技術を提供する。
【解決手段】本実施形態の情報処理システムは、分割手段と、検索手段と、を有する。分割手段は、店舗の地図を複数のエリアに分割する。検索手段は、前記分割手段で分割されたエリア単位で、客が購入を予定する購入予定商品が陳列されている陳列箇所を含む複数の経由地を巡回案内させる案内経路を検索する。
(もっと読む)
情報表示装置、情報表示方法、情報表示プログラムおよび情報表示プログラムを格納した記録媒体
【課題】自転車走行や徒歩時などにおいて、適切な移動可能な範囲を示すエリアを算出、表示することができる情報表示装置、情報表示方法、情報表示プログラムおよび情報表示プログラムを格納した記録媒体を提供する。
【解決手段】サーバ部30で、端末部10から設定された散策時間から残り時間を算出し、走行情報と身体情報と環境情報から使用者の疲労度を考慮した残り時間における走行可能距離を算出し、その走行可能距離から移動可能エリアを算出して、端末部10でその移動可能エリアを表示する。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラム
【課題】放置車両を救済する最適な経路を提示可能なナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、レンタサイクルの利用情報に基づいて所定条件に合致するレンタサイクルを放置車両として検出し、放置車両として検出されたレンタサイクルを仮想ステーションとして登録し、レンタサイクルを含む移動手段と出発地と目的地とを少なくとも含む経路探索条件を満たす、出発地から目的地までのレンタサイクルを利用する経路を含む候補経路を、交通網を規定するネットワークデータネットワークデータ、ならびに、ステーションと仮想ステーションの位置情報および台数情報を用いて探索して、経路案内情報を生成し、生成された経路案内情報の少なくとも一部を、出力部を介して出力する。
(もっと読む)
推定位置評価システム及びプログラム
【課題】推定位置評価システム及びプログラムにおいて、推定環境地図上の任意の地点で推定した自己位置が、実環境地図上の実際の位置からどの程度ずれているかを比較的簡単に、且つ、精度良く評価することを目的とする。
【解決手段】ロボットが移動経路を挟む特徴点ペアの間を通過する時の自己位置推定結果を求め、特徴点ペアの推定環境地図上の座標値と、ロボットが特徴点ペアの間を通過する時のロボットの座標値を基準とした位置情報とに基づいて、推定環境地図上のロボット位置を計算し、推定環境地図上のロボット位置と自己位置推定結果を比較することでロボットの自己位置推定を評価するように構成する。
(もっと読む)
水陸両用車の経路探索装置
【課題】水陸両用車が上陸する際の安全な経路を自動的に探索する経路探索装置を提供する。
【解決手段】水陸両用車から陸上までの距離を一辺の長さとする矩形の大エリアと、これを分割した矩形の小エリアとを設定する経路探索エリア設定部37と、小エリアごとに水上経路評価のための情報と水際経路評価のための情報と陸上経路評価のための情報とを取得する情報取得部31と、小エリアごとに水上経路評価のための情報に基づき危険度スコアを決定して第1判定値Tを求める水上経路評価部33と、小エリアごとに水際経路評価のための情報に基づき危険度スコアを決定して第2判定値Tを求める水際経路評価部32と、小エリアごとに陸上経路評価のための情報に基づき危険度スコアを決定して第3判定値Tを求める陸上経路評価部34と、小エリアごとに第1〜第3判定値Tに基づいて危険度評価値を決定する評価切替部35及び経路探索部36とを有する構成とする。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラム
【課題】レンタサイクルの最適なリソース配分を可能にするナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、レンタサイクルを含む移動手段と出発地と目的地とを少なくとも含む経路探索条件を設定し、設定された経路探索条件を満たす出発地から目的地までのレンタサイクルを利用する経路を含む候補経路を、ネットワークデータならびにステーションの位置情報およびステーションに停車中のレンタサイクルの台数情報を用いて探索して、経路案内情報を生成し、生成された経路案内情報の少なくとも一部を出力部を介して出力する。
(もっと読む)
車椅子利用者用ナビゲーション装置
【課題】GPSの受信不可能な駅構内でも、自車位置検知手段として、車いすに装着されたセンサでのみ行う自立航法で行い、これにより検知された自車位置に基づきバリアフリー経路を誘導案内することを可能とする。
【解決手段】駅の出入り口とホーム間、異なるホーム間バリアフリー経路を1つのリンクとして扱い、そのリンク上に設けられた誘導案内ポイント付近に接近した場合、当該誘導ポイント周辺光景の実画像情報を表示し、利用者が当該誘導ポイントに到着し、確認操作を行った時点で自車位置を誘導ポイントに設定補正する。
(もっと読む)
位置検出システム、方法、記憶媒体、及びプログラム
【課題】投射光領域の輪郭が不明瞭な場合でも、移動体の正確な位置を検出する。
【解決手段】移動体の位置を検出する位置検出システムであって、天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、前記投射光の画像領域の重心位置を算出する算出手段と、前記重心位置を床面の前記移動体の位置へと変換する位置変換手段とにより達成される。
(もっと読む)
経路探索システム、経路探索方法、及び移動体
【課題】理想的な最短経路により近い経路を生成可能とする。
【解決手段】本発明に係る経路探索システム110は、進入禁止グリッドが設定されたグリッドマップを記憶する地図情報記憶部111と、移動始点及び障害物からの距離に応じたポテンシャル値に基づき、各グリッドの距離ポテンシャル値を生成する距離ポテンシャル生成部112と、前回のグリッド探索ベクトルから、次探索グリッドの決定と、局所ポテンシャル場計算用グリッドの選択をする探索グリッド決定部113と、局所ポテンシャル場を計算する局所ポテンシャル場計算部114と、前回のグリッド探索ベクトルが次探索グリッドに進入する際のエッジ上の点を探索枝の基点として、局所ポテンシャル場の最急勾配で降る方向に探索枝を延ばし、その方向をグリッド探索ベクトルとして決定するグリッド探索方向決定部115とを備える。
(もっと読む)
ナビゲーション装置
【課題】目的地まで自転車で走行して向かう場合に風による影響によって目的地までどのくらい時間を要する等の走行難易度を把握させることができるナビゲーション装置を提供することを目的とする。
【解決手段】風力データ取得手段によって得られた風力データの風向き及び風力情報を経路探索手段で探索された経路にそれぞれ対応付けを行い、対応付けられた往路及び復路の経路に対して旅行難易度を算出して算出結果を通知することができるように構成し、自転車で現在位置から目的地まで向かう場合、経路上における風向きや風力の影響を考慮した旅行難易度を算出して算出結果を通知する。
(もっと読む)
自律移動体、自己位置推定方法、地図情報作成システム
【課題】自己位置推定の精度を向上することができる自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法を提供する。
【解決手段】本発明の自律移動体は、周囲の障害物までの距離に応じた距離データを測定するレーザセンサと、記移動環境の異なる測定面での2次元の推定用地図情報を複数記憶する地図情報記憶部22と、自己位置又はレーザセンサの測定角度に基づいて、地図情報記憶部22に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部26と、地図情報選択部26で選択された推定用地図情報とレーザセンサで測定された距離データとに基づいて、自己位置を推定する自己位置推定部23と、を備えた。
(もっと読む)
経路生成装置と方法および経路生成装置を備える移動装置
【課題】移動経路の探索において、より高速で移動可能な移動経路を見つけ出すことで、移動装置の高速移動を可能にすることにある。
【解決手段】自律移動する移動装置の移動経路を生成する経路生成装置10であって、移動開始位置から目標到達位置までの間に設定され移動経路の生成の指標となる複数の経由位置を記憶した記憶装置3と、移動装置の現在位置を検出する位置検出装置5と、移動装置の移動中において、現在位置に基づいて、複数の経由位置のうち移動装置が次に通過する経由位置に向かうための移動経路を生成する経路探索装置9とを備える。経路探索装置9は、複数の移動経路候補を生成するとともに、これら移動経路候補の各々について高速走行可能度を算出し、これら高速走行可能度を互いに比較することで、複数の移動経路候補の中から、最も高速走行可能度が高い移動経路候補を選択し、選択した移動経路候補を実際に使用する移動経路として設定する。
(もっと読む)
移動体搭載装置及び移動体管理装置
【課題】移動体を利用した移動を行っているユーザの状況を、離れた場所から把握できるようにし、さらに把握された状況に応じた適切な処理が行われるようにする。
【解決手段】福祉用電動車両100の車載装置200は、利用者が福祉用電動車両に乗車中か否か、及び福祉用電動車両が移動中か否かを検知することが可能である。車載装置200は、監視者通信端末210からの着呼を受けた場合、利用者が乗車中か否か及び福祉用電動車両が移動中か否かの検知結果に基づいて、利用者が車載装置を用いて通話を行うことが可能な状況かどうかを判定する。そして、利用者が車載装置を用いて通話を行うことが可能であれば利用者に車載装置を用いた通話を行わせる一方、不可能であれば、別の登録されている通信装置(利用者宅家電話機260や携帯電話機280)から、利用者の現在の状況に最適な通信装置を選択し、通話要求を転送する。
(もっと読む)
制御装置、プログラム及び制御方法
【課題】対象物の移送状況に応じて適切な省電力が可能となる制御装置等を提供する。
【解決手段】工作機械3に取り付けられた制御装置2は測位装置を制御する。制御装置2は速度及び振動情報を取得する。制御装置2は取得した速度が所定速度を超える場合に、第1状態と判断する。第1状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期へ変更する。取得した速度が所定速度以下の場合には、第2状態と判断する。第2状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期より短い第2周期へ変更する。第2状態へ移行した後、取得した速度が所定速度を超える場合、制御装置2は第1状態へ移行する。第2状態へ移行した後、取得した振動情報が予め記憶した振動パターンにマッチした場合、制御装置2は第3状態と判断する。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
経路探索システム、経路探索方法、経路探索プログラム、及び移動体
【課題】人間の通行が妨げられるのを防ぐことができる経路探索システム、経路探索方法、経路探索プログラム、及び移動体を提供すること。
【解決手段】本発明にかかる経路探索システムは、移動領域内に存在する移動始点より移動を開始し、移動領域内に存在する移動終点に到達する移動体の移動経路を探索するロボットであって、移動領域の情報に基づいて、基準経路を探索する最適経路探索部112と、基準経路の進行方向に基づいて、シフト方向を決定するシフト方向決定部113と、基準経路をシフト方向にシフトして、移動経路を決定する移動経路決定部115と、を備えるものである。
(もっと読む)
1 - 20 / 51
[ Back to top ]