
Fターム[3C007BS15]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 水平多関節型 (420)
Fターム[3C007BS15]に分類される特許
1 - 20 / 420
多関節ロボット
【課題】複数の関節アクチュエータでの配線構造の共通化を図り、しかも自己の電源ノイズによる制御系への悪影響を抑制する。
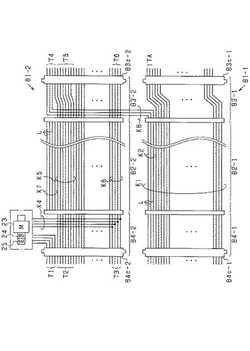
【解決手段】関節アクチュエータの配線モジュールにおいて、入力側コネクタ84c−2には全アクチュエータ共通の分配用端子T1が設けられ、出力側コネクタ83c−2には全アクチュエータ共通の次段電力用端子4が設けられている。また、配線モジュールにおいて、電源線配列部K1で信号線K6から最も離れた位置にある次段用電源線K2を次段電力用端子T4に接続すること、及び、電源線配列部K1の残りの電源線を、1関節アクチュエータ分の電源線の分ずつ信号線K6から離れる側にずらして出力側コネクタ83c−1に接続することにより、電源線の配列が組み替えられている。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法

【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
多関節型ロボット
【課題】占有空間の縮小を図りつつ、先端部を上下に直進運動させる多関節型ロボットを得ること。
【解決手段】多関節型ロボット50は、第1回転軸13aで回転可能とされた第1アーム21と、第1アームに沿って移動するスライド部6と、スライド部に第2回転軸13bで連結された第1リンク部3と、第1リンク部に第3回転軸13cで連結された第1先端部10と、第1アームと第4回転軸13dで連結され、第1リンク部に第5回転軸13eで連結された第2リンク部4と、を備え、第2回転軸は、第1回転軸および第1アームの延びる方向と略垂直に設けられ、第4回転軸は、第2回転軸と第3回転軸との略中央に設けられ、第5回転軸は、スライド部の移動する延長線上に位置し、第4回転軸と第5回転軸との距離は、第2回転軸と第3回転軸との距離の略半分の距離とされ、第3,4,5回転軸は、第2回転軸と略平行に設けられる。
(もっと読む)
ロボット位置検出装置及びロボットシステム
【課題】移動中のロボットから検出される該ロボットの位置に対してその精度を高めることが可能なロボット位置検出装置及びロボットシステムを提供する。
【解決手段】位置算出部60は、トリガー信号が入力されるトリガー信号入力部61と、エンコーダーから出力された位置データが通信時間の分だけ遅れて入力される位置データ入力部62と、入力された位置データを取得してトリガー信号検出時におけるロボットの位置を算出するデータ処理部63とを備えている。データ処理部63は、トリガー信号が検出される前に取得した第1の位置データとそのタイミング、及び、トリガー信号が検出された後の第2の位置データとそのタイミングを用いてロボットの位置を線形補間し、トリガー信号が入力されたタイミングよりも通信時間だけ後の位置をトリガー信号検出時におけるロボットの位置として算出する。
(もっと読む)
搬送ロボット
【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
水平多関節ロボット及び水平多関節ロボットの制御方法
【課題】制振制御に用いられる角速度センサーの数を低減するとともに該角速度センサーに接続される電気配線に要求される耐久性を低くした水平多関節ロボット及び水平多関節ロボットの制御方法を提供する。
【解決手段】ロボットは、基台に連結される第1水平アームと、第1水平アームを介して前記基台に連結される第2水平アーム15と、各アームを回転させる第1及び第2モーター13,16と、各モーターの回転角度及び回転速度を算出するための第1及び第2エンコーダー13E,16Eとを有している。第1モーター制御部43は、角速度センサー30が検出したセンサー角速度ωA2から第1及び第2エンコーダー13E,16Eに基づく第1及び第2角速度ωA1m,ωA2mを減算し、演算結果である振動角速度ωA1sに基づく振動速度V1sと第1回転速度V1fbとの加算した速度計測値が速度指令Vcとなるように第1モーター13を制御する。
(もっと読む)
ロボット制御装置、ロボットシステム、及びロボット制御方法
【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
水平多関節ロボット
【課題】角速度センサーを用いて制振制御を行う水平多関節ロボットにおいて、該角速度センサーに接続される電気配線の耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、第2水平アーム15に設置され基台11に対する第1水平アーム12の角速度を得るための角速度センサー30を備え、第1水平アーム12の角速度に基づく第1モーター13の駆動によって第1水平アーム12を制振する。ロボット10は、基台11と第2水平アーム15とに端部が連結されるとともに、第1水平アーム12の外側、且つ第2水平アーム15の外側に配設されて、基台11内と第2水平アーム15内とに通じる通路を有する配線ダクト33に、第2水平アーム15に内蔵された第2モーター16に接続される電気配線35と、角速度センサー30に接続される電気配線36とが引き回されている。
(もっと読む)
ロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法
【課題】ロボットが有する駆動源の駆動量と実際のロボットの状態とを画像に基づいて対応付ける処理の効率を高めることの可能なロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法を提供する。
【解決手段】
水平多関節ロボット10(ロボット10)用位置検出装置は、撮像対象であるロボット10又はワークWを撮像するカメラ22と、撮像対象の位置を画像から算出する制御部33と、ロボット10の第1及び第2モーター11a,13aの駆動量を取得するI/O31と、撮像対象の算出位置と駆動量とを対応付けて記憶する。上記カメラ22及びI/O31には、撮像対象の位置を検出するための共通するトリガー信号が入力される。カメラ22は、トリガー信号の入力によって撮像対象の撮像を開始する一方、I/O31では、同トリガー信号の入力によって制御部33が駆動量を得る。
(もっと読む)
ロボット
【課題】 減速機の温度が上昇しても減速機収納室の内圧が上昇することを防止して、減速機収納室内の潤滑剤が外部に流出することを防止できるロボットを提供すること。
【解決手段】 スカラロボットAにおいて、駆動装置32をフレーム部材31に連結固定し、駆動装置32によって駆動される減速機33の出力部35をフレーム部材21に連結固定して、フレーム部材21に対してフレーム部材31を回転可能に組み付けるとともに、減速機33を収納する減速機収納室内に潤滑剤を充填した。そして、潤滑剤の上面より上方となる減速機収納室の空間部33bの所定部から、この所定部より上方の上方点まで延びて減速機収納室を外部に連通させる圧抜き経路38とエアチューブ39をフレーム部材31に設け、エアチューブ39の途中にコイル部39aを形成した。
(もっと読む)
相対駆動装置、移動体、及びロボット
【課題】従来と異なる方式の相対駆動装置を提供する。
【解決手段】第1の駆動機構と第2の駆動機構とを有する相対駆動装置10であって、ステーター15と、第1のローター20と、第2のローター1020と、を備え、前記ステーターは、第1の電磁コイル100と前記第1の電磁コイルに流す電流を制御する第1の制御部500とを有し、前記第1のローターは、第1と第2の磁石200、1200を有し、前記第2のローターは、第2の電磁コイル1100と、前記第2の電磁コイルに流す電流を制御する第2の制御部1500とを有し、前記第1の電磁コイルと前記第1の磁石とは対向して配置されて、前記第1の駆動機構を構成し、前記第2の電磁コイルと前記第2の磁石とは対向して配置されて、前記第2の駆動機構を構成している。
(もっと読む)
ワーク搬送装置
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
吸着装置及びロボットシステム
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
搬送アーム装置
【課題】可動範囲が広く、位置決め精度やメンテナンス性に優れた搬送アーム装置を提供する。
【解決手段】基台2上に基部111を枢設された第1アーム11と、その先端部112に基部121を枢設された第2アーム12と、その先端部122に基部131を枢設されたハンド部13と、第1アーム回動手段6と、第2アーム回動手段7とを有し、基台2に対する第1アーム11および第2アーム12の角度をそれぞれ変化させることでハンド部13の基部131を所定の位置に移動させる搬送アーム装置1であって、第2アーム回動手段7が、基台2上に枢設され第1アーム11と同一の回動中心114を有する回動部材14と、回動部材14と第2アーム12とを連結する連結手段20とを備えており、基台2に対して回動部材14および第2アーム12が同一方向に同一角度連動して回動するように構成した。
(もっと読む)
探索装置、自動組付け装置、探索方法、およびプログラム
【課題】部品のワークへの組付け位置を精度よく探索できる探索装置を提供する。
【解決手段】ワークは、バカ穴とバカ穴の底面に形成されたネジ穴とを有する。探索装置は、ネジと底面とを接触させた状態で、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを移動させる。探索装置は、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを各々移動させたときに反力が閾値Th1以上となる位置Pα,Pβ,Pγ,Pδを特定する。探索装置は、位置Pαと位置Pβとの間の距離が閾値Th2未満の場合には、位置Pαと位置Pβとの中間位置を起点としたv軸方向への移動と、位置Pγおよび位置Pδの特定とを実行する。探索装置は、位置Pγと位置Pδとの間の距離が閾値Th2未満の場合には、位置Pγと位置Pδとの中間位置をネジの組付け位置と判断する。
(もっと読む)
基板搬送装置
【課題】2段のピンセットによる搬入出動作を同じタイミングで行い、基板搬送に係る処理時間を短縮する。
【解決手段】基台上に相対向して立設された一対の第一及び第二の昇降軸7,8と、前記第一の昇降軸に沿って昇降自在に設けられると共に、第一のピンセット15をステージに対し進退移動させる第一の進退移動手段13と、前記第一の進退移動手段を前記第一の昇降軸に沿って昇降移動させる第一の昇降手段11と、前記第二の昇降軸に沿って昇降自在に設けられると共に、第二のピンセット16をステージに対し進退移動させる第二の進退移動手段14と、前記第二の進退移動手段を前記第二の昇降軸に沿って昇降移動させる第二の昇降手段12と、前記第一及び第二の進退移動手段の駆動制御、及び前記第一及び第二の昇降手段の駆動制御を行う制御手段19とを備える。
(もっと読む)
搬送ロボット用エンドエフェクタ
【課題】搬送物の状態に応じて使い分けることができるエンドエフェクタを、簡単な構造によって達成すること。
【解決手段】本発明のエンドエフェクタにおいて、アームの先端部に装着されるハンド基部と、ハンド基部に回転可能に設けられた複数の基板保持部材と、複数の基板保持部材を各回転軸線周りに回転させる回転駆動手段と、を備える。複数の基板保持部材のそれぞれは、回転軸線に沿って延在する細長部材を有し、回転軸線周りに細長部材を回転させることによって、細長部材の側面全体のうちの基板を保持する部分が変わるように構成されている。
(もっと読む)
物品搬送装置
【課題】ファンを用いて物品を搬送する物品搬送装置において、物品に関わる検出器を可及的に減らせるようにする。
【解決手段】移載装置1、非接触でガラス基板を搬送する装置である。移載装置は、ケース22と、ファン24と、吹き出し口28と、電流値測定部と、ファン制御部30と、を備えている。ケース22は、ガラス基板に対向する物品対向部42を有している。ファン24は、ファンケース54の内部に設けられている。吹き出し部は、物品対向部42に設けられ、ファン24との間で空気を流す。電流値測定部は、ファン24の負荷を検出する。ファン制御部30は、電流値測定部の検出結果によりファン24を制御する。
(もっと読む)
基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法、及び基板位置補正方法
【課題】基板の位置ずれを検出することが可能な基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法を提供する。また、基板位置補正方法を提供する。
【解決手段】基板搬送用ロボットシステム10は、基板Wの下面に接触する接触部PBL、PFL、PBR、PFR及び接触部PBL、PFL、PBR、PFRに接触した基板Wの重心位置を検出するための複数のセンサSBL、SFL、SBR、SFRが設けられた基板搬送用ハンド60を有する基板搬送用ロボット20と、1)基板搬送用ハンド60上の基準となる位置にて基板Wが支持された際の各センサSBL、SFL、SBR、SFRの検出値である基準値と現在の各センサSBL、SFL、SBR、SFRの検出値との差分をそれぞれ演算する差分演算部70及び2)各差分に基づいて基板Wの位置ずれ方向を判断する第1の判断部72を有する第1の制御装置30とを備える。
(もっと読む)
搬送ロボット
【課題】昇降駆動手段において必要となる昇降駆動力を低減することができる搬送ロボットを提供すること。
【解決手段】本発明の搬送ロボットは、第1軸線周りに回転可能に構成された第1リンク部材と、第1軸線に対して所定距離に位置する第2軸線周りに回転可能に構成された第2リンク部材と、第2軸線に対して所定距離に位置する第3軸線周りに回転可能であり且つ物品を保持可能に構成された保持部材と、少なくとも保持部材を昇降駆動するための昇降駆動手段と、を備える。第1リンク部材、第2リンク部材、及び保持部材が、この順番で連結されてアームリンク機構を構成しており、昇降駆動手段が、第1リンク部材と保持部材との間に配置されてアームリンク機構の一部を構成している。
(もっと読む)
1 - 20 / 420
[ Back to top ]