
Fターム[3C007CU00]の内容
マニピュレータ、ロボット (46,145) | 腕 (311)
Fターム[3C007CU00]の下位に属するFターム
腕を形成する素材 (33)
腕が伸縮するもの (49)
腕が直列配列の平行リンク型 (42)
腕の中に駆動源を有するもの (26)
腕の中に光路、流体路を有するもの (35)
腕が可撓性、柔軟性のもの (29)
軽量高剛性のもの (32)
腕が交換できるもの (48)
Fターム[3C007CU00]に分類される特許
1 - 17 / 17
ロボット
【課題】
適切な性能を維持しながらも、より省コストに提供できるようにしたロボットを得ることを目的とする。
【解決手段】
基台と、第1軸まわりに回転可能に基台に連結される第1構造体と、第1軸に対して直交する第2軸まわりに回転可能に第1構造体に連結される第2構造体と、第2軸と平行な第3軸まわりに回転可能に第2構造体に連結される第3構造体と、を少なくとも有するロボットであって、第1構造体と第3構造体とは、同形状の鋳物材を用いて形成される。
(もっと読む)
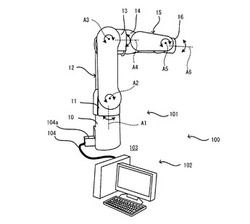
ロボットアーム及びロボットアームの制御方法

【課題】ロボットアームの軌道に障害物がある場合でも、迅速に障害物を退避し、タスクを効率よく実行する。
【解決手段】ハンド部5と、複数の関節11,12,13と、ハンド部5及び関節11,12,13とを連結する複数の連結部14,15,16,17とを有するロボットアーム1であって、ハンド部5が物体を把持して移動する工程と、関節13に備えられたひじあて部6が障害物を押圧する工程と、を有する。
(もっと読む)
被塗装物保持ロボットおよび塗装用ロボットシステム
【課題】塗装中に吹き付けの気流が乱れ、ロボット等の装置周辺を余分な塗料で汚染することを防止することが可能な被塗装物保持ロボットおよび塗装用ロボットシステムを提供する。
【解決手段】被塗装物保持ロボット10は、固定されたベース部20と、第1軸J1を中心にベース部20に対して旋回する細長状の第1アーム11とを備えている。L字状の第2アーム12は、第2軸J2を中心に第1アーム11に対して旋回し、細長状の第3アーム13は、第3軸J3を中心に第2アーム12に対して旋回する。また第3アーム13の先端13bに、被塗装物Wを保持する第1保持部14が設けられている。
(もっと読む)
ロボットの制御装置およびロボット
【課題】力センサを用いることなく、ロボットと障害物との接触を高精度に検出可能で安全性を向上させるロボットの制御装置を提供する。
【解決手段】
ロボットの駆動力を制御するロボットの制御装置であり、制御装置は所望の動作軌跡と速度を出力し、駆動力が所定時間内にロボットに対してした仕事量である制御仕事量を算出し、エネルギー推定値を算出し、所定時間内のエネルギー変化の推定値を算出し、制御仕事量とエネルギー変化推定値とに基づいてロボットへの動作指令速度を調整または停止指令または警報を発生するように構成する。
(もっと読む)
多関節ロボット
【課題】エンドエフェクターの可動範囲の拡大が図れると共に、可動範囲を自由に変更で
きる多関節ロボットを提供すること。
【解決手段】ベース部10と、ベース部10に対して第1関節20によって回動自在に連
結される第1アーム30と、第1アーム30よりも短い長さであって第1アーム30に対
して第2関節40によって回動自在に連結される第2アーム50と、第2アーム50に装
着されるエンドエフェクター60とを有する。第1アーム30に、第1アーム30を屈曲
して所望の屈曲角度で固定する屈曲固定部35を設ける。屈曲固定部35は、第1アーム
30を構成する2本のアーム部材31,33同士を回動自在に連結している部分を締結具
で固定する構造である。
(もっと読む)
真空搬送装置の製造方法及び真空搬送装置
【課題】アームの軽量化を図りつつ、製造工程を簡略化することができる真空搬送装置の製造方法及び真空搬送装置を提供する。
【解決手段】搬送ロボットの製造方法において、アーム本体20を構成する上側板25、下側板26及び環状部材27と、関節軸を支持する各ブシュ21〜23とから中空構造のアーム5を組み立て、上側板25、下側板26及び環状部材27を互いに接合する接合部と、それらの部材と各ブシュ21〜23の接合部とにロウ材を付着させる工程と、組み立てられたアーム5を真空加熱して、ロウ付けする工程とを有する。
(もっと読む)
放熱機能付き旋回型アーム及び水平多関節型ロボット
【課題】アームの旋回移動を妨げることなくモータなどの発熱体から伝達される熱を効率よく放熱する機能を有する放熱機能付き旋回型アーム、及び該旋回型アームを備える水平多関節型ロボットを提供する。
【解決手段】回転軸としての軸心C2を中心として旋回移動する熱伝導性の材料からなるアームの筐体20に伝達される熱を放熱する機能を有する放熱機能付き旋回型アームには、その旋回移動方向に面する側面部20Sに同アームの筐体20の旋回軌跡と非平行な突条からなる複数の放熱フィン20Fが設けられている。各放熱フィン20Fは、上下方向に対して筐体の長さH1よりも短い長さH2に形成されており、天板23と放熱フィン20Fの上端F2との間にはそれぞれ突条の突出方向と交差する方向に空気を流通させる高さが通路幅H3の流通路が設けられている。
(もっと読む)
ロボットアーム及びロボットアーム装置
【課題】ロボットアームに加わる衝撃力を緩和する装置を製作する際に、その装置を構成する部品の加工時間や、それらの部品を組み立てたり、調整したりする時間がかかるという課題がある。
【解決手段】ロボットアーム3は、軸Aの方向に直列に並ぶ2つのアーム部分30,31と、2つのアーム部分30,31を連結する連結部と、軸Aの方向の力を検出するセンサとしての圧電素子62と、圧電素子62の電気的変化を検出し、信号を出力する検出回路と、信号によって電源回路を遮断する遮断回路と、電源回路に接続され、電圧の変化によって伸縮する電歪ポリマー63と、電歪ポリマー63を包んだ状態で外形形状が変化する包装部64と、を備え、包装部64の軸Aの方向と直交する両側の面K1,K2が、2つのアーム部分30,31のうちの一方のアーム部分と、他方のアーム部分または連結部に当接して備えられる。
(もっと読む)
多軸ロボット用の関節構造体およびこのような関節構造体を備えたロボット
【課題】3自由度を有する多関節型ロボットにおいて、小さなイナーシャとなるアーム関節構造を提案すること。
【解決手段】第一軸線Z1および第二軸線Z2に対して垂直な軸線X14,X24のいずれかを中心にしてプレート123,124に対して第一連接棒121の枢着部を制御している第三電動アクチュエータ23を備えている関節構造体において、第三アクチュエータ23が基部10上に、もしくはアーム11上に取り付けられている。
(もっと読む)
水平多関節型ロボット
【課題】応答性能や位置決め精度を維持しつつ、その可動範囲を広く確保することのできる水平多関節型ロボットを提供する。
【解決手段】スカラロボットには、基台11に第1のアーム13の基端部を回動可能に支持する連結軸12が設けられ、その軸心C1を中心に第1のモータM1により正逆回転される。第1のアーム13の先端部には、第2のアーム15の基端部を支持させる支持軸14が連結されその軸心C2を中心に第2のモータM2により正逆回転される。第2のアーム15には先端部に軸心C3を有する主軸16が設けられている。第1のアーム13は軸心C1と軸心C2とを結ぶ中心線に対して偏心しており、左側面に右側に凹むかたちの凹部13dが形成され、すなわち右側に湾曲した形状に形成されている。軸心C2と軸心C3との距離は、軸心C1と軸心C2との距離よりも短いことから主軸16が凹部13dに入り込ませるかたちに配置させることができる。
(もっと読む)
水平多関節ロボット
【課題】水平多関節ロボットにおいて、高温基板搬送時の熱影響によるアームの姿勢変化を最小限に抑え、高精度な搬送を維持できるようにする。
【解決手段】アームが、駆動部1からの回転動作を伝達する伝達機構と、伝達機構を収容するアームケース201と、伝達機構を覆うようにアームケース201の上面に装着されるアームカバー214と、によって構成された水平多関節ロボットにおいて、アームカバー214が、アームケース201が延在する方向に複数分割された複数のアームカバーからなるよう構成し、さらに複数のアームカバー214が互いに折り重なる部分を形成した。
(もっと読む)
スカラロボット
【課題】ワークを組み付けるサイクルタイムを短縮し、ワークの組み付け精度を高められるスカラロボットを提供する。
【解決手段】第一回転軸11を中心に回動する第一アーム21と、この第一アーム21の先端部23に設けられる第二回転軸31と、この第二回転軸31を中心に回動する第二アーム41とを備え、この第二アーム41の先端部43ハンドリング部51が設けられ、第一アーム21と第二アーム41とをそれぞれ回動させることによってこのハンドリング部51を少なくとも2次元方向に移動するスカラロボット1であって、第二アーム41の長さL2を第一アーム21の長さL1より短くし、第一アーム21に凹状に窪むハンドリング凹部35を形成し、第二アーム41が一方に回動することによりハンドリング部51がこのハンドリング凹部35に収まる構成とした。
(もっと読む)
組立てシステム
【課題】作業効率を向上できる組立てシステムを提供すること。
【解決手段】組立てシステム1は、搬送経路2を搬送されるワーク4をロボット10で組み立てる。ロボット10は、ロボット本体20と、このロボット本体20に軸支されるアーム30と、このアーム30の先端に軸支されたハンド37と、を備える。アーム30は、ロボット本体20側から順に、第1軸311、第2軸321、第3軸331、第4軸341、第5軸351および第6軸361で互いに軸支された第1腕部31、第2腕部32、第3腕部33、第4腕部34、第5腕部35および第6腕部36を備える。ロボット本体20からワーク4までの距離は、アーム30を水平に延ばした場合のロボット本体20から第3軸331までの距離に略等しくなるように設定され、第4腕部34は、湾曲している。
(もっと読む)
人型ロボットの腕駆動装置
【課題】腕の慣性モーメントを減少させて、手で物を持つ動作や腕に装着したツールで作業を行う動作等、腕に荷重が加わる動作に適切に対応し得るようにすることにある。
【解決手段】人型ロボットの腕3の可動軸に設けられてその可動軸を駆動する駆動モータと、その駆動モータのための制御系機器とを具える腕駆動装置において、腕3の肩3aの可動軸が、連結順序で前記人型ロボットの胴体1に近い側から順に肩ピッチ軸5と肩ロール軸6と肩ヨー軸7とを具え、肩ヨー軸7を駆動するサーボモータ16が,前記人型ロボットの、肩ヨー軸線Yに対し連結順序で胴体1に近い側の部位である肩ヨー軸筐体3cに搭載されていることを特徴とする、人型ロボットの腕駆動装置である。
(もっと読む)
仮想ばねシステム
【課題】さほど精度は高くないが安価に構成できる仮想ばねシステムを提供することにある。
【解決手段】基部に支持された電動式アクチュエータ1と、前記基部に揺動可能に結合された被駆動部材にその電動式アクチュエータの出力部材を連結するとともに、それら被駆動部材と出力部材との間に働く引張力または圧縮力を検出する連結・力検出手段4と、その連結・力検出手段が検出した力の大きさに基づき前記電動式アクチュエータの作動を制御するアクチュエータ制御手段とを具え、前記連結・力検出手段が、前記被駆動部材と出力部材との一方に連結された案内部材4cと、前記被駆動部材と出力部材との他方に連結されるとともに前記案内部材と摺動可能に嵌まり合ったスライド部材4eと、前記案内部材とスライド部材との間で挟圧されて圧縮力を検出する感圧センサ4aと、を有してなる、仮想ばねシステムである。
(もっと読む)
ロボット手首機構および回転アームの左右配置替え方法
【課題】 ロボット動作域にワーク保持装置などの配置を余儀なくされる場合に、基準軸線からオフセット状態にあるアーム本体を反転させ、周囲物との干渉を回避すると共にその位置から左右略同等量の回転を可能にする。
【解決手段】 制御ケーブル10,11を中空駆動シャフト3Cから出る時点で通過する引出し部14,15を、中空駆動シャフト3Cに180度隔てて二箇所設ける。アーム本体3Bの過回転を阻止するストッパの取付部も180度隔てて二箇所設けられる。制御ケーブル10,11には、引出し部14,15と駆動すべきモータ8,9との間で切り離しを可能にしたコネクタ23,24を介在させておく。コンジットケーブルの延伸経路を反転後も変えないようにしつつ、アーム本体の動きを周囲物に影響されない状態にしておくことができる。
(もっと読む)
産業用ロボット
【課題】ロボットの第1アームとワークや治具の干渉が少ない産業用ロボットを提供する。
【解決手段】 ロボットの第1アーム9を、旋回部4に対して回動する方向に、かつ第1アーム9と第2アーム12の内角と反対方向に湾曲させることにより、ロボットが治具16上に保持した箱形状のワーク17の内側で作業を行う場合、湾曲したアームの凹空間13において、干渉点18との干渉を避けることができ、ワーク底面19まで作業することができるので、従来のロボットのワーク内作業領域に比べ、広いワーク内作業領域20を確保することができる。
(もっと読む)
1 - 17 / 17
[ Back to top ]