
Fターム[3C007CW08]の内容
マニピュレータ、ロボット (46,145) | 第2の腕の動作形態 (416) | 第2の腕が回動するもの (374) | 垂直面内のみ回動 (108)
Fターム[3C007CW08]に分類される特許
1 - 20 / 108
ロボット
【課題】
適切な性能を維持しながらも、より省コストに提供できるようにしたロボットを得ることを目的とする。
【解決手段】
基台と、第1軸まわりに回転可能に基台に連結される第1構造体と、第1軸に対して直交する第2軸まわりに回転可能に第1構造体に連結される第2構造体と、第2軸と平行な第3軸まわりに回転可能に第2構造体に連結される第3構造体と、を少なくとも有するロボットであって、第1構造体と第3構造体とは、同形状の鋳物材を用いて形成される。
(もっと読む)
吸着装置及びロボットシステム

【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
多関節ロボットおよびロボット関節構造
【課題】バックラッシュによるガタツキを抑制することにより、関節部を精度よく動作させることが可能な多関節ロボットを提供する。
【解決手段】この多関節ロボット100は、骨格フレーム21側に設けられ、互いに対向するように配置されるとともに、曲げ軸L4を回動中心として互いに独立して回動可能な一対の入力側傘歯車62と、一対の入力側傘歯車62の両方に噛み合うように骨格フレーム31側に設けられ、一対の入力側傘歯車62が回動することによって、回動軸L3を回動中心として回動可能であるとともに曲げ軸L4回りに揺動可能な出力側傘歯車63と、一対の入力側傘歯車62の両方に噛み合った状態で出力側傘歯車63を回動軸L3回りの一方の回動方向に付勢する定荷重バネ64とを含む。
(もっと読む)
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット
【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
ワーク搬送装置
【課題】設置に広いスペースを必要としないコンパクトな装置であるとともに、効率的なワークの搬入搬出動作ができるワーク搬送装置を提供すること。
【解決手段】支持フレーム2と、第1軸J1まわりに回動自在に支持される第1アーム3と、第1軸J1上に配置され支持フレーム2に対して相対的に姿勢を保持可能な基準姿勢保持部材と、第1アーム3に対して第1軸J1と平行な第2軸J2まわりに回動自在に支持される第2アーム5と、第1軸J1と平行であって第2軸からの距離が略等距離である第3軸J3及び第4軸J4上にそれぞれ配置され、第2アーム5に対して第3軸J3及び第4軸J4まわりにそれぞれ回動自在に支持される第1及び第2ハンド51、52と、を備え、第1アーム3又は第2アーム5が回動した場合であっても、支持フレーム2に対する第1及び第2ハンド51、52の姿勢が保持されることを特徴とするワーク搬送装置。
(もっと読む)
ロボット
【課題】適切な剛性を有する直動軸受が選定されたロボットシステムを提供する。
【解決手段】この塗装ロボット100(ロボットシステム)は、ロボット本体10と、ロボット本体10を直線移動可能に支持する直動軸受2および3とを備え、直動軸受2および3は、直動軸受2および3の撓みに起因する変位を考慮して予め設定された、ロボット本体10の重量と直動軸受2および3の剛性との相関関係に基づいて選定されている。
(もっと読む)
アーム駆動機構、及びこれを備えたマニピュレータ
【課題】先端部に作業ツールが装着されるアーム機構を大型化させることなくアーム機構を姿勢変更させることのできるアーム駆動機構及びこれを備えたマニピュレータを提供する。
【解決手段】アーム駆動機構は、一対の回転体と、両回転体に掛け渡される無端環状体と、駆動モータにより回転されるスクリューシャフトと、スクリューシャフトに螺合され、無端環状体の一部が固着されたスライダとを備え、他方の回転体が一方の回転体よりも小径に設定され、無端環状体の回転体間にある二つの対向部のうちの一方の外周側が巻き掛けられて他方の回転体側にある対向部を平行にするアイドラを備え、スクリューシャフトが一方の対向部の外周側と対向するように配置されている。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
7軸多関節ロボットの制御方法及び制御プログラム
【課題】手首の位置を移動する際に7軸多関節ロボットの形態の急激な変化を抑制する。
【解決手段】7つの回転軸のうちのいずれか1つを冗長軸に、残りの回転軸のうちの3つを基軸に、かつ3つの基軸のうちのいずれか1つを変数軸に定め、かつ、基端から前記手首までの直線距離と基端に最も近い回転軸の延在方向における基端から手首までの距離とに基づく手首の位置と前記変数軸の関節角とに関して定式化された4次方程式を解いて手首の位置を3つの基軸の関節角に逆変換するステップを含み、電源オン時に、7軸多関節ロボットの初期形態に基づいて4つの第1求解演算式のうちいずれか1つを特定して記憶し、 電源オンの後、記憶した1つの第1求解演算式を用いて逆変換するステップを遂行して手首の目標位置から3つの基軸の関節角を算定し、それにより、7軸多関節ロボットの動作を制御する。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
被塗装物保持ロボットおよび塗装用ロボットシステム
【課題】塗装中に吹き付けの気流が乱れ、ロボット等の装置周辺を余分な塗料で汚染することを防止することが可能な被塗装物保持ロボットおよび塗装用ロボットシステムを提供する。
【解決手段】被塗装物保持ロボット10は、固定されたベース部20と、第1軸J1を中心にベース部20に対して旋回する細長状の第1アーム11とを備えている。L字状の第2アーム12は、第2軸J2を中心に第1アーム11に対して旋回し、細長状の第3アーム13は、第3軸J3を中心に第2アーム12に対して旋回する。また第3アーム13の先端13bに、被塗装物Wを保持する第1保持部14が設けられている。
(もっと読む)
ロボットアーム、ロボットアームの接触検知方法、及び、ロボットアームを備えた装置
【課題】他の物体への接触を検知する信頼性、経済性、及び、稼働率などを向上させることができ、接触トラブルによる損害をより低減することの可能なロボットアーム、ロボットアームの接触検知方法、及び、ロボットアームを備えた装置の提供を目的とする。
【解決手段】ロボットアーム10は、駆動モータ2a、2b、2cと、モータ軸用の角度センサ22a、22b、22cと、減速機と、出力軸用の角度センサ32a、32b、32cと、ロボットアーム部4a、4b、4cと、モータ制御手段50とを備えた構成としてある。
(もっと読む)
マニピュレータ装置
【課題】オペレータがマニピュレータ装置のアームユニットの位置を的確に認識することができ、操作を容易にすることができる。
【解決手段】マニピュレータ装置が、ハンド側旋回動作軸を回転中心として旋回可能に腕部の他端に連結されたハンド部を備えるアームユニットと、使用者の手により操作される操作部と、ハンド側旋回動作軸と同じ方向に配置された操作側旋回動作軸を回転中心として操作部を旋回可能に腕部に連結する連結部と、操作部と連結部との間に介在して配置され、操作側旋回動作軸回りに作用する回転力を検出する力検出用センサとを備える操作ユニットと、力検出用センサにより検出された回転力の大きさに応じてハンド部を旋回させる駆動装置と、駆動装置によりハンド部に付与される駆動力を操作部に伝達し、ハンド部の回動角度に応じて、操作部を旋回させる連動機構とを備える。
(もっと読む)
マニピュレータ装置
【課題】オペレータがマニピュレータ装置のアームユニットの位置を的確に認識することができ、操作を容易にすることができる。
【解決手段】マニピュレータ装置が、ハンド側旋回動作軸を回転中心として旋回可能に腕部の他端に連結されたハンド部を備えるアームユニットと、使用者の手により操作される操作部と、操作部を腕部に連結する連結部と、操作部と連結部との間に介在して配置され、ハンド側旋回動作軸と同じ方向に配置された操作側旋回動作軸回りに作用する回転力を検出する力検出用センサとを備える操作ユニットと、力検出用センサにより検出された回転力の大きさに応じてハンド部を旋回させる駆動装置とを備える。
(もっと読む)
マニピュレータの操作評価装置及びこれを備えたパワーアシスト装置
【課題】マニピュレータの操作性を客観的に評価することのできる操作評価装置と、これを備えたパワーアシスト装置を提供する。
【解決手段】操作者により操作される操作部1、2と、該操作部1、2の操作入力に基づいて複数の動作を行う動作部11とを備えたマニピュレータに於いて、前記操作部1、2によるマニピュレータの操作性を評価するための操作評価装置であって、前記動作部11を基準位置から目標位置にまで到達させる一の動作を行わせるために要した操作部1、2の操作時間と、前記動作部11が到達した位置と目標位置との差と、前記操作部1、2の操作入力に、前記動作部11に他の動作を行わせるための操作入力が付加された場合に於いて該付加された操作入力量とを評価要素としてマニピュレータの操作性を評価する評価手段を備えている。
(もっと読む)
移送ロボットの制御方法
【課題】本発明は、比較的小さな設置面積に配置でき、上下への昇降範囲が広くできるとともに、安全にワークを移送することが可能な移送ロボットを提供する。
【解決手段】搬送物を載置するハンド部14と、前記ハンド部14を一方向に移動させる水平アーム機構30と、前記水平アーム機構30を上下に移動する昇降機構20を備えた移送ロボットにおいて、前記昇降機構20が、ベース部材2に備えられた少なくとも2組のリンク機構から構成され、2組のリンク機構の第2関節部6が互いに内側になるように動作させながら、ハンド部14のローリング方向、横ずれ動作、ヨーイング方向の動作を行なう。
(もっと読む)
ハンドリングシステム
【課題】本発明は、段取り換えを容易にでき、1つのロボットの動作に複数の機能を備えたハンドリングシステムを提供する。
【解決手段】双腕ロボットを用いた組立作業をするハンドリングシステムにおいて、前記双腕ロボットが、線状体送給部に対面するように配置されたものである。
(もっと読む)
多軸ロボット用の関節構造体およびこのような関節構造体を備えたロボット
【課題】3自由度を有する多関節型ロボットにおいて、小さなイナーシャとなるアーム関節構造を提案すること。
【解決手段】第一軸線Z1および第二軸線Z2に対して垂直な軸線X14,X24のいずれかを中心にしてプレート123,124に対して第一連接棒121の枢着部を制御している第三電動アクチュエータ23を備えている関節構造体において、第三アクチュエータ23が基部10上に、もしくはアーム11上に取り付けられている。
(もっと読む)
ロボットにより工作機械へワークの着脱を行うロボットシステム
【課題】ロボットにより工作機械へワークの着脱を行うロボットシステムの利便性や処理効率を高める。
【解決手段】工作機械10へワーク1の着脱を行うロボット20は、工作機械10の、ワーク1を出し入れするための扉12が形成された左側面14に対して垂直に延びる走行軸部材40、およびそれに沿ってスライド移動するスライダ部材50を有する走行軸機構30と、スライダ部材50に取り付けられた可動アーム機構60を有している。可動アーム機構60は、一端がスライダ部材50に第1の軸71回りに回転可能に取り付けられた第1のアーム70、第1の軸71に平行な第2の軸72回りに回転可能に第1のアーム70の他端に一端が取り付けられた第2のアーム80、および第2のアーム80の他端に取り付けられたワークの保持機構を有している。
(もっと読む)
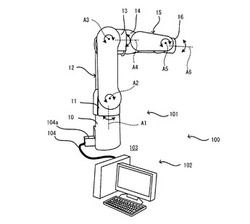
物品搬送用垂直多関節アーム機構
【課題】駆動源の出力トルクを拡大して重量物の搬送に対応可能垂直多関節アーム機構を提供する。
【解決手段】所定部材3に第1関節部10を介して連結され、該第1関節部10周りに鉛直面内を旋回可能な第1アーム11と、該第1アーム11に第2関節部20を介して連結され、該第2関節部20周りに前記鉛直面と平行な鉛直面内を旋回可能な第2アーム21と、前記第1関節部10に設けられ、前記第1アーム11を前記第1関節部10周りに旋回させる第1駆動機構51と、前記第2関節部20に設けられ、前記第2アーム21を前記第2関節部20周りに旋回させる第2駆動機構52と、を有した物品搬送用垂直多関節アーム機構1である。前記第1駆動機構51及び前記第2駆動機構52の少なくとも一方の駆動機構は、駆動源61と、該駆動源61から入力される回転動作に基づいて前記アーム11,21の旋回動作を作り出すカム機構とを備える。
(もっと読む)
1 - 20 / 108
[ Back to top ]