
Fターム[3C007DS01]の内容
マニピュレータ、ロボット (46,145) | 把持装置の全体構成 (1,374) | 単一の挟持装置又は吸着装置 (1,104)
Fターム[3C007DS01]の下位に属するFターム
複数の把持部を有するもの (214)
Fターム[3C007DS01]に分類される特許
1 - 20 / 890
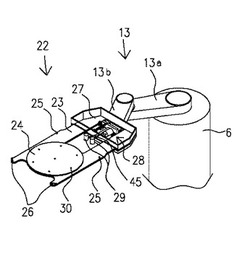
薄板状物の把持装置、および薄板状物の把持方法
【課題】
摩擦による塵埃の発生及び飛散を抑制し、従来の搬送ハンドからの置き換えが容易に且つ安価に出来、軽量で、かつ狭隘な場所にもアクセス可能な薄型の把持装置を提供すること。
【解決手段】
把持装置22は、内部に圧縮気体流通のための流路36と、圧縮気体を噴出させる噴出口30を有する搬送フィンガ23と、搬送フィンガ23先端に固定された第1の把持部材26と、駆動手段28によって動作させられる第2の把持部材29とを具えている。圧縮気体の噴出力によって浮上させられた薄板状物の周縁部を、第1の把持部材26と第2の把持部材29とで、位置ずれ補正を行いながら把持する。
(もっと読む)
形状自在な吸着グリッパとこれによる把持方法

【課題】ワークの形状及び大きさによらずに確実にワークを把持することを可能とする吸着グリッパを提供する。
【解決手段】一端に受圧面11aを有する固定部材11と、受圧面11aに密着して取り付けられ、内部に粒体12bを充填させた可撓性かつ気密性の中空バッグ12aを有する把持部12とを有し、中空バッグ12aは、把持部12を鉛直下向きにした場合において中心部を鉛直方向に貫通した減圧空間17と減圧空間17を取り囲む中空バッグ内部空間とを有し、かつ、ワーク6の固定部材11に対向する面に対して押し付ける押付力によって、その接触部分におけるワークの形状にならうようになっており、さらに、減圧空間17及び中空バッグ内部空間の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置9を有する。
(もっと読む)
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされている。
(もっと読む)
ロボットハンド
【課題】把持ストロークを可変にしつつ、軽量化かつ小型化できるロボットハンドを提供する。
【解決手段】ワークを把持するロボットハンド10であって、水平方向に配置されるサーボモータ21と、鉛直軸Pを中心とする平面視における仮想円Rの円周上に配置される複数のツメ60と、サーボモータ21の水平軸周りの回転を、鉛直軸P周りの回転に変換する第1変換機構30と、鉛直軸P周りの回転を、鉛直軸P方向の直線移動に変換する第2変換機構40と、鉛直軸P方向の直線移動を、仮想円Rの径方向Dの直線移動に変換する第3変換機構50と、を具備し、ツメ60は、第3変換機構50によって、仮想円Rの径方向Dに移動する。
(もっと読む)
ロボットハンド及びロボット装置
【課題】対象物を安定して把持しつつ対象物の姿勢を制御することが可能なロボットハンド及びロボット装置を提供する。
【解決手段】対象物を把持する2つの指部101,102を備え、2つの指部101,102の各々には、対象物を把持する部分に回転部材110が設けられ、2つの指部101,102で対象物を把持した状態で、2つの指部101,102の回転部材110が回転可能にされており、2つの指部101,102の回転部材110の相対位置を変更する第1指部移動機構150を備え、第1指部移動機構150により、2つの指部101,102の回転部材110の回転軸が互いに近づく方向または遠ざかる方向に2つの指部101,102の相対位置が切り換えられる。
(もっと読む)
ロボットハンド及びロボット装置
【課題】簡素に低コストで異種形状や寸法違いを含む多種の対象物を把持することが可能なロボットハンドを提供する。
【解決手段】第1の指部103と第2の指部104とを含む3以上の指部と、3以上の指部を開閉動作させる駆動部MTRと、第1の指部103と第2の指部104の開閉動作を行う向きを変更する指部移動機構と、を備え、指部移動機構は、ウオームホイール131と、モーターと、ウオーム133と、を備え、第1の指部103にはウオーム133の回転に連動してウオーム133の回転方向とは異なる方向に回転する第1歯車141が設けられ、第2の指部104にはウオーム133の回転に連動して第1歯車141の回転方向とは反対の方向に回転する第2歯車142が設けられており、第1の指部103と第2の指部104とは、モーターが回転することにより互いに近づく方向もしくは遠ざかる方向に回転する。
(もっと読む)
ノズル及びその製造方法
【課題】短時間で製造可能なノズル及びその製造方法を提供することである。
【解決手段】ノズル10は、チップ部品20を吸着するための吸着面Sであって、凹曲面をなしている吸着面Sを有する。吸着面Sには、吸引孔Hが設けられている。吸着面Sを平面視したときに、吸着面Sの底部を中心とする円Bと底部を通過する2本の直線L1,L2とが交差する交差部A1〜A4が、円B上の交差部A1〜A4以外の部分に対して窪んでいる。
(もっと読む)
把持装置
【課題】被把持物と接触する接触部を交換する必要が生じたとき、圧力センサ全体を交換することなく、その接触部のみ交換できるようにする。
【解決手段】把持装置は、両側に電極22a,22bが設けられた圧電素子21を電極22a,22bに接続された1対のフレキシブル基板23a,23bで挟み込んで形成された圧電振動型圧力センサ20を、ワークを把持する把持部6の指先部6a及び中節部6bに圧電素子21と1対のフレキシブル基板23a,23bを把持部6の把持力方向に配置して備え、さらに、把持部6に着脱可能に設けられた耐油性、耐薬性の弾性を有するゴム製の保護層24を備えている。被覆部材の劣化、傷、摩耗、ヘタリが生じても、圧電振動型圧力センサ全体を交換する必要がなく、保護層24のみを交換できる。
(もっと読む)
ハニカム構造体の搬送装置、及び、ハニカム構造体の封口方法
【課題】ハニカム構造体の貫通孔と封口用マスクの貫通孔との正確な位置合わせを容易に行なうことのできるハニカム構造体の搬送装置及びハニカム構造体の封口方法を提供する。
【解決手段】初期回転角度認識部が、カメラ90の画像に基づいてハニカム構造体70の初期回転角度を認識し、必要回転角度取得部が、アーム水平旋回部62の駆動に伴うハニカム構造体70の回転角度に基づいて、封口用マスク170に対するハニカム構造体70の回転角度を所望の最終回転角度とするために必要な回転角度を取得し、ハンド軸回転制御部が、必要な回転角度に基づいてハンド軸回転部20を駆動してハンド10が把持したハニカム構造体70を回転させる。ハニカム構造体70を封口用マスク170の上に所望の回転角度として配置できるので、封口用マスク170とハニカム構造体70との位置合わせが容易となる。
(もっと読む)
モーター、ロボットハンドおよびロボット
【課題】モーターの用途に最適なモーター出力(トルク)とトルクリップルのバランスを容易に調整することができるモーターを提供する。
【解決手段】円柱形状の回転体と、回転軸と、前記回転軸を回転可能に支持する基体と、前記回転体の外周に対向配置される円筒形状のステーターと、を備え、前記回転体は円周方向にN極とS極とが交互に配置される磁石を有し、前記ステーターは空芯巻線を複数有し、前記空芯巻線は、前記回転体の回転方向に直交する第1配線、および第2配線と、前記回転体の回転方向に延伸する第3配線、および第4配線と、前記第1、第2、第3および第4配線の各配線端部を繋ぎ、8角形形状の斜辺を形成する4つの第5配線と、を有し、前記空芯巻線が、前記磁石の磁極の幅に相当する幅をa、相数をm(m:3以上の整数)とした場合に、前記空芯巻線の中心間の間隔がa/mで配置されるモーター。
(もっと読む)
真空吸着装置
【課題】大型で歪みの大きい加工材料を容易に吸着することができ、且つ加工応力に耐えうる保持力も確保することができる真空吸着装置を提供する。
【解決手段】被加工物30に対して進退可能に設けられ、減圧または粘着によって上記被加工物の表面を係着させる第1の係着部材15と、この第1の係着部材の周りを囲む如く形成され、上記被加工物における上記第1の係着部材による係着部の外側周囲部分を減圧によって係着させる第2の係着部材17とを備えたことを特徴とする。
(もっと読む)
把持装置及びその制御方法
【課題】より簡素な構成で把持対象物の把持確認及び把持解除確認を行うこと。
【解決手段】第1及び第2の把持部材が把持対象物を把持する把持位置よりも閉側の位置である基準位置に位置しているか否かを検出する検出手段を設け、把持対象物の把持後に前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出されなかった場合に、把持対象物の把持が正常であると判定し、把持対象物の把持の解除後、前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出された場合に、把持の解除が正常であると判定する。
(もっと読む)
マニプレータ装置およびマニプレータ付き作業装置
【課題】
任意の位置にある把持対象物が、マニプレータによる把持可能な範囲に入るように、マニプレータを操作するための情報を取得し、また、その情報を操作者に分かりやすく提示する。
【解決手段】
アーム部とハンド部から成り、当該ハンド部は、把持範囲にある対象物を把持する1つまたは複数の指部を有するマニプレータ装置であって、前記指部の先端に第1の全方位撮像装置を設けるとともに、前記ハンド部の、前記指部の先端以外の位置に第2の全方位撮像装置を設け、前記第1の全方位撮像装置と前記第2の全方位撮像装置とは撮像軸が異なるように、例えば直交するように構成する。第1の全方位撮像装置による撮像画像に対象物が投影されず、且つ、第2の全方位撮像装置による撮像画像に対象物が投影されないことを確認することで、前記対象物が把持範囲にあることを判定することができる。
(もっと読む)
把持装置およびその制御方法
【課題】形状が異なる複数種類のワークを安定的な把持を実現しつつ、従来に比して当接部材の寿命を延ばすことができる把持装置およびその制御方法を提供する。
【解決手段】ワーク50を把持するための把持部2と、把持動作を制御するための制御装置7と、把持部2のワーク50と当接する部位に付設され、ワーク50の形状に倣って変形し、その変形を保持し得る当接部材6と、を備え、把持部2の把持動作によって、当接部材6をワーク50に押圧して該ワーク50の外形形状に倣わせるとともに、該当接部材6の形状を保持して、ワーク50を把持する把持装置1であって、制御装置7は、所定の把持回数ごとに、ワーク50を把持した際の当接部材6のワーク50に対する当接位置を変更する。
(もっと読む)
ロボットハンド装置
【課題】柔軟な対象物を痛めたり、傷つけたりすることなく、把持することが可能なロボットハンド装置の提供。
【解決手段】ハンド先端部に、対象物Mを把持する一対の把持体1と、各保持体1の把持面1aを覆うように固定された柔軟膜により構成される袋体2と、袋体2に充填されたゲル状流体3とを有するロボットハンド装置であり、対象物Mが把持される際に、把持体1と対象物Mとの接触面に対して略一定の面圧が作用し、局所的な接触圧が発生しないため、柔軟な対象物Mを痛めたり、傷つけたりすることなく、把持することが可能となる。
(もっと読む)
トング式吊具
【課題】
ワークの自重を利用したリンク機構の回転動作でワークを挟込んで吊持するトング式吊具について、装置構成が小型,簡素であるという利点が損なわれず、ワークの吊持作業の安全性が確保されるようにする。
【解決手段】
ワークWの自重を利用したリンク機構の回転動作でワークWを挟込んで吊持するものである。相対してワークWを挟込む挟込支持部13がリンク機構を構成するトングアーム2の下部にそれぞれ回転可能に取付けられている。一方のトングアーム2には、一方の挟込支持部13を回転駆動する回転駆動部16が取付けられている。回転駆動部16は、手動の操作ハンドル16aで回転操作されるウオームギア16b,ウオームホイール16cのギア噛合構造からなる。
(もっと読む)
電気機械装置およびそれを用いたアクチュエーター、モーター、ロボット、ロボットハンド。
【課題】電気機械装置を小型化する技術を提供する。
【解決手段】電気機械装置の一種である動力発生装置100は、中心軸110と、永久磁
石123を有するローター121と、ローター121の外周に配置されたステーターであ
る電磁コイル124と、ローター121に連結され、回転駆動力の伝達に用いられる回転
機構部130と、前記回転機構と負荷とを接続する負荷接続部133とを備える。ロータ
ー121には、中心軸110と永久磁石123との間において、少なくとも中心軸110
の軸方向の一方に開口し、回転機構部130の少なくとも一部を収容する収容空間として
の凹部1212が形成されている。回転機構部130は、ローターと接続または一体に形
成される入力部と、ステーターと接続または一体に形成される固定部と、負荷接続部13
3と接続または一体に形成される出力部とを有する。
(もっと読む)
ロボットハンド
【課題】指部材を平行移動させる方式で狭い作業スペースでの作業に適用可能なロボット
ハンドを提供する。
【解決手段】対象物を把持する指部材を移動部材から立設し、掌部材に設けられた移動機
構によって移動部材を所定軸方向に移動させることで指部材を移動させて対象物を把持す
る。移動部材を所定軸方向に移動させるためのガイド部材を移動部材から立設させ、ガイ
ド部材を掌部材に対して摺動させることによってガイドする。こうすれば、指部材の間隔
を狭める(移動部材を掌部材に近づける)と、ガイド部材は掌部材に対して摺動しながら
移動部材の移動とともに移動するので、ロボットハンドが小さくなる。このため、指部材
を平行移動させる方式のロボットハンドでありながら、狭い作業スペースで小さな対象物
を把持する作業にも適用することが可能となる。
(もっと読む)
位置決め装置およびロボットハンド
【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
1 - 20 / 890
[ Back to top ]