
Fターム[3C007HT00]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840)
Fターム[3C007HT00]の下位に属するFターム
可撓性部材 (556)
リンク (192)
回転シャフト (109)
ネジ移動 (226)
歯車 (480)
カム機構 (31)
磁気結合機構 (16)
弾性連結機構 (80)
摩擦伝動機構 (13)
流体伝達機構 (1)
クラッチを有するもの (29)
ブレーキを有するもの (102)
Fターム[3C007HT00]に分類される特許
1 - 5 / 5
パラレルメカニズムロボット
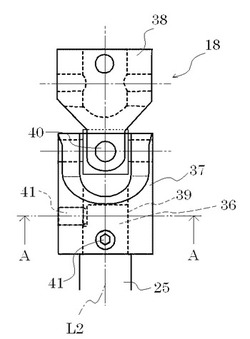
【課題】 軸回転機構を繰り返し回転したとしても軸回転機構における回転方向の位相ずれを僅かなものに維持する。
【解決手段】 軸端部36と軸受カップ37との連結部において、角柱形の軸端部36の少なくとも2つの外側面43a,43bを軸受カップ37の2つの内側面44a,44bに押し付けた状態で軸端部36を軸受カップ37に連結固定する。
(もっと読む)
パラレルメカニズム

【課題】 旋回軸に設けられている自在継手の磨耗を低減することが可能なパラレルメカニズムを提供する。
【解決手段】 パラレルメカニズム1は、ベース部2に取り付けられた電動モータ21に一端が接続され、他端がエンドエフェクタ部13に接続され、電動モータ21の駆動力をエンドエフェクタ部13に伝達する旋回軸ロッド20を備える。旋回軸ロッド20は、その両端に、一対のヨーク24,25を十字軸26により連結したユニバーサルジョイント22,23を有する。十字軸26は、3本のピン27,28,29と、これらのピン27,28,29が十字状に嵌挿されるピン孔が形成されたコマ30を有し、十字軸26に加わるスラスト荷重を受けるスラストベアリング33,34が、ヨーク24,25とコマ30との間に挿入されている。
(もっと読む)
アクチュエータ装置およびこれを用いるロボット装置
【課題】動力停止時には外力により関節等を容易に動かすことができ、定常的に大きな負荷が作用した場合にも効率を損なわず、アクチュエータ自体を湾曲設置可能として柔軟に配置できるようにしたアクチュエータ装置およびロボット装置を提供する。
【解決手段】モータの回転を線方向の動作に変換するアクチュエータ装置において、モータに直接または間接的に接続されて回転する回転基部(12または15)と、前記回転基部の回転軸上でスライド可能に設けられた摺動基部(15または16)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(14)と、前記遠心力を利用して前記回転基部と摺動基部間の距離を変更するリンク機構(13)とを有するユニットを1以上設けて構成する。
(もっと読む)
真空状態に減圧された処理室内部のアームを駆動する搬送装置
【課題】 コンパクトで低振動・低騒音であり、特に半導体ウエハやLCD(液品表示)ガラス基盤などを処理するのに適する搬送装置を得る。
【解決手段】 アーム61A、61Bを取着し同軸状に配置した出力軸21A、21Bに連結された外接軸20A、20Bと、外接軸の外周に接触配置された複数の中間軸30A、30Bと、中間軸の外周に内接する内接円筒40A、40Bとからなり、中間軸を回転自在に支持するキャリア10を固定し、各組の中間軸30A、30Bに前段減速機50A、50Bを介して駆動モータ70A、70Bを接続した。
(もっと読む)
ワーク搬送用ロボット
【課題】アームの熱膨脹収縮により生じるハンド部材の偏位量を許容範囲内に収めることができるアーム回動形のワーク搬送用ロボットを提供する。
【解決手段】固定プーリ8,27と、一端が固定プーリ8,27に対して回動自在に支持されたアーム13,26と、アーム13,26の他端に回転自在に支持された回転プーリ15,29と、固定プーリと回転プーリとの間に張設されたベルト17,30とを備えたアーム機構を多段に設けて、最終段のアーム機構の回転プーリ29にハンド部材40を取り付けたワーク搬送用ロボットにおいて、アーム13,26の熱膨脹収縮によりハンド部材40に生じる偏位を許容範囲に収めるように、テンションローラ22,35からベルト17,30に与える張力を調整するようにした。
(もっと読む)
1 - 5 / 5
[ Back to top ]