
Fターム[3C007JS00]の内容
マニピュレータ、ロボット (46,145) | 制御装置の具体的構成 (854)
Fターム[3C007JS00]の下位に属するFターム
制御盤等を含むシステム全体の構成 (484)
制御回路内での配置、接続 (136)
機構部との配置関係 (76)
通信、データ伝送の方法と処理 (152)
Fターム[3C007JS00]に分類される特許
1 - 6 / 6
産業機器のコントローラ
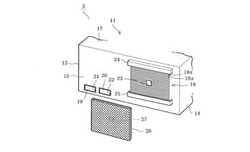
【課題】吸気口を通じて筐体内部に吸入される空気を通過させるフィルタの汚れ具合を精度よく判断することができる産業機器のコントローラを提供する。
【解決手段】吸気口18を複数の開口18aにより細分化された構成とし、吸気口18を通じて吸入される空気の流速を高め得るようにする。フィルタ26は、取付枠24、25に取り付けられた状態において、筐体11の前後方向に移動可能とする。取付枠24、25にフィルタ26が取り付けられた状態で、互いに対向するような位置に筐体側電極23およびフィルタ側電極27を設ける。
(もっと読む)
アプリケーション管理システム及びその管理方法

【課題】本発明は、アプリケーション管理システム及びその管理方法に関する。
【解決手段】アプリケーション管理システムであって、複数の連続する所定の時間信号を周期的に出力するクロック・ユニットと、受信した2つの連続する時間信号の間でアプリケーションが実行される実行回数を計算するカウント・ユニットと、エイジテーブルを格納する記憶ユニットと、処理ユニットと、を具備する。又、本発明は、アプリケーションの管理方法にも関する。
(もっと読む)
多用途ロボット制御システム
【課題】商業標準のコンピュータシステムを利用し、異なるロボットに対応できるロボット制御システムを提供すること。
【解決手段】改良型の多用途ロボット制御システム10は、汎用オペレーティングシステムを有する汎用コンピュータ14を備える。この汎用コンピュータ14は、ロボット命令24のプログラム処理を選択的に開始および停止し、複数のロボット動作コマンド26を生成するプログラム実行モジュール18を含む。リアルタイムコンピュータサブシステムは、動作コマンドデータバッファ34と、動作を順次処理しロボットの機械ジョイントに必要な位置を計算するデータバッファ34にリンクされたロボット動作モジュール32と、動作モジュール32とソフトウェア的に通信する、ロボットのジョイント位置フィードバック信号44/46から必要なアクチュエータ活動化信号50/52を繰り返し計算する動的な制御アルゴリズム38とを含む。
(もっと読む)
多重バイナリ入力を使用したロボットプログラミング制御
【課題】多重バイナリ入力を使用したロボットプログラミング制御を提供する。
【解決手段】ロボット制御をプログラムする方法は、制御ループで実行可能な動作を定める段階と、実行可能な動作に対する修正又は追加を行うサブプログラムを確立する段階とを含む。サブプログラムは、外部バイナリ入力により実行される。外部バイナリ入力は、制御ループの実行の間に提供されて、制御ループの部分としてサブプログラムを実行することができるようにする。
(もっと読む)
ロボット制御装置
【課題】各部材の設置の自由度を向上させることができるロボット制御装置を提供することにある。
【解決手段】筐体2内の略上下中央に平板状の隔壁60を設けた。その隔壁60によって形成される下側収容空間S1にモータドライバ40を設けるとともに、上側収容空間S2に第1スイッチング電源ボード70及び第2スイッチング電源ボード72を設けた。また、筐体2のベース部3の内側面にCPUボードを設けて、そのCPUボードの上面と、左側板4及び右側板5の前面4a,5aよりも突出して形成したベース部3の突出部3bの上面とに駆動制御ボード20を設けた。
(もっと読む)
ロボット制御装置
【課題】筐体内の放熱効率の高いロボット制御装置を提供することにある。
【解決手段】筐体2の背板7の内側面に設けた駆動制御ボードCBの前側に、各モータドライバ40a〜40dを駆動制御ボードCBに案内して配置固定するためのガイドレールR1〜R4を有する支持台50を設けた。そして、ガイドレールR1〜R4に沿って各モータドライバ40a〜40dを摺動させて、モータドライバ40a,40b及びモータドライバ40c,40dの各放熱フィン62の上面62dを互いに向かい合わせて配置固定した。さらに、その放熱フィン62間の間隙と対向する位置に冷却ファン65を設けた。
(もっと読む)
1 - 6 / 6
[ Back to top ]