
Fターム[3C007KS00]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001)
Fターム[3C007KS00]の下位に属するFターム
作業対象物の状態 (971)
作業環境(例;雰囲気温度) (665)
マニピュレータの状態 (1,659)
接触 (238)
すべり (31)
力 (648)
距離、接近 (394)
電圧、電流 (87)
時間 (35)
音声 (227)
外乱 (14)
Fターム[3C007KS00]に分類される特許
1 - 20 / 32
ロボットシミュレーション画像表示システム
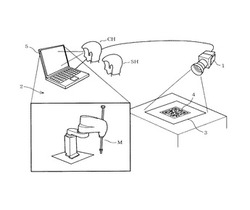
【課題】ロボットの3次元画像モデルの動画像を、必要に応じて柔軟な形態で表示できるロボットシミュレーション画像表示システムを提供する。
【解決手段】QRコード4にロボットの型番情報Tと3次元画像モデルMを動作させるデモ用プログラムSPを記録し、パソコン2は、カメラ1が撮像したQRコード4の画像データ中の4点Q1〜Q4に対応するスクリーン上の4点P1〜P4から、基準点C0を3次元座標の原点とし、原点からQ1,Q2に沿う方向をX軸,Y軸,XY平面上で原点に立つ法線をZ軸として、QRコード4の3次元空間における姿勢情報:回転行列Mrを取得し、回転行列Mrを3次元画像データRに乗算して3次元画像モデルMをディスプレイ5に表示させる。カメラ1により撮像されるQRコード4の位置・姿勢が変化すると3次元画像モデルMの位置・姿勢も変化させ、デモ用プログラムSPに従い3次元空間表示で動作させる。
(もっと読む)
段積み部品取出し装置

【課題】段積みされた部品を効率良く取出す装置を提供する。
【解決手段】平面上で位置決めできる本体と、本体に取り付けられたアクチュエータ62と、該アクチュエータ62により駆動されて上昇端位置α1と下降端位置の2ポイントの位置で上下動する上下本体63と、該上下本体63に自重で上下動できるように貫通状態で設置された自重上下軸41と、該自重上下軸41がその下降端位置にあることを検出するセンサPH1とを具備する段積み部品取出し装置において、前記自重上下軸41の上端部には、自重で下降することを停止させる自重軸ストッパ45が設けられ、前記自重上下軸41の下端部には、部品を把持するチャック21と、前記自重上下軸41を部品上面で停止させるためのストッパ51が設けられていることを特徴とする。
(もっと読む)
把持部を有するロボットハンドシステム
【課題】把持部を有するロボットハンドシステムにおいて、センサを複数必要とせずに、最小限の把持力で対象物を把持することを可能とすることである。
【解決手段】ロボットハンドシステム10のハードウェアの部分は、1つの昇降アクチュエータ12と、複数の把持アクチュエータ14と、複数の多関節部17の各先端の把持端部にそれぞれ設けられる探触子20を含んで構成される。探触子20に接続される接触・滑り度検出部50は、探触子20に対象物が全く接触していない非接触状態と、探触子20と対象物が相対的に移動していない接触把持状態と、探触子20と対象物が相対的に移動していわゆる滑っている滑り状態とを区別して検出する機能を有する。この機能を用いて、制御部70は、最小限の把持力で対象物を把持するように、把持アクチュエータ14を駆動する。
(もっと読む)
把持装置
【課題】基板上に実装されるワークを把持する把持装置において、ワークを基板へ実装したときの接合部温度を検知し、最適な接合温度によるワークと基板との接合を可能とする把持装置を提供する。
【解決手段】基板40上に実装されるワーク30を把持する把持装置10において、ワークに接触する把持部材20a、20bと、把持部材に設けられ、基板とワークとの接合部43a、43bの温度を検知する温度検知機構21a、21bと、を備える。
(もっと読む)
ランドマーク検出装置および方法ならびにプログラム
【課題】ランドマークを精度よく検出する。
【解決手段】光源を有するランドマーク200と、ランドマーク200の発光の時間変化を制御する発光パターン制御手段201と、ランドマーク200を含む画像を撮像する撮像手段100と、撮像手段100からの画像を処理しランドマーク200をその発光パターンに着目して検出する画像処理手段101と、画像処理手段101で単位時間当りに処理できる画像枚数に応じてランドマーク200の発光パターンを決定する発光パターン決定手段102と、発光パターン決定手段102で決定された発光パターンを発光パターン制御手段201へ伝達する制御信号送信手段103からなり、発光パターン制御手段201は、制御信号送信手段103から伝達された発光パターンに基づいてランドマーク200の発光パターンを変更する。
(もっと読む)
脚式移動ロボット
【課題】搭載するカメラ(撮像素子)に太陽光などの高輝度の光源が写り込まれるとき、光源の方向を特定し、よって撮影対象を適切な輝度値で撮影可能とした脚式移動ロボットを提供する。
【解決手段】撮影対象を含む外界からの入射光によって画像を撮像する撮像素子(CCDカメラ)によって撮像された画像に高輝度の入射光によって撮像された高輝度撮像部位があるとき、ハンドを駆動するなどして高輝度の入射光の方向を特定する入射方向特定動作を実行する(S10からS14)。また、高輝度撮像部位の輝度を低減する輝度低減動作も実行する(S16からS36)。
(もっと読む)
移動ロボットの駆動装置
【課題】安全性を考慮した低電圧要求と高速移動のための高電圧要求とを共に満足し、よって効率的に電圧を供給するようにした移動ロボットの駆動装置を提供する。
【解決手段】関節を介して連結される複数本のリンク(大腿リンクなど)の関節に配置される電動モータ(1Yモータ42,2Yモータ46など)と、複数本のリンク以外の部位に配置される電源(バッテリ)28と、電源と電動モータを接続する電力線90を通じて電源から供給される電圧を通電指令に応じて電動モータに供給して駆動する駆動回路(モータドライバ92)とを備えた移動ロボットの駆動装置において、電動モータに供給される駆動電圧を昇圧する昇圧器98を備えると共に、電動モータと昇圧器と駆動回路とを同一のリンク(大腿リンクなど)に配置する。
(もっと読む)
搬送ロボットシステム
【課題】簡易な構成で、アームのたわみによる教示位置のずれ量を補正できる搬送ロボットシステムを提供する。
【解決手段】ワークを載置保持するハンド12と、前記ハンド12を変位可能に構成されるアーム15・16と、前記ハンド12に対するワークの基準載置位置と実際の載置位置との差分を検出するアライメント装置と、前記アーム15・16の実際の位置と教示位置との差分を補正する教示位置補正手段と、を有する搬送ロボットシステムにおいて、前記ハンド12に備えられる加速度センサー24と、搬送過程において前記加速度センサー24によって検出される実加速度と予め指示された教示加速度との差分を算出する加速度差分算出手段と、を具備し、前記教示位置補正手段は、前記加速度差分に基づいて実位置を教示位置を補正する搬送ロボットシステム。
(もっと読む)
板書連携プレゼンロボット、板書連携プレゼンロボットの制御方法及び制御プログラム
【課題】プレゼンターの板書を再生する際、その板書の再生に合わせて、その板書の内容に対応する身振りを実現することができるようにする。
【解決手段】プレゼンターの板書が記録されている録画データを取得し、その録画データに記録されている板書を解析する板書解析部4と、板書解析部4の解析結果にしたがって上肢等の動作命令を生成する動作命令生成部6とを設け、板書再生部8が板書を再生する際、その板書の再生に合わせて、動作命令生成部6により生成された動作命令にしたがって板書連携プレゼンロボット10の右手等を動かすアクチュエータを制御する。
(もっと読む)
複数ロボット間の相対位置計算方法
【課題】複数のロボット間の相対位置を正確に計算する。
【解決手段】第1のロボット1のフランジ面17aと接合治具7の一端側の接合面7aとを接合すると共に第2のロボット2のフランジ面27aと接合治具7の他端側の接合面7bとを接合し、接合箇所を測定点に移動させた状態で各ロボット1,2の位置及び姿勢を表す測定データを取得し、同一直線上に存在しない3点以上の測定点で取得した各ロボット1,2の測定データを計算してロボット1,2間の相対位置を計算する。第1のロボット1の位置及び姿勢を変化させることに追従して接合治具7を介して第2のロボット2の位置及び姿勢を変化させることができ、第1のロボット1が教示する点と第2のロボット2が教示する点とを確実に同一にすることができる。
(もっと読む)
基板搬送装置、基板搬送モジュール、基板搬送方法及び記憶媒体
【課題】冷機状態、暖機状態の区別なく、運転再開後直ぐに本来の搬送精度で基板の搬送を行うことができ、基板間における処理について高い均一性が得られる基板搬送装置等を提供する。
【解決手段】
基板を保持する保持部13に回転自在にアーム部11、12が連結された関節型の搬送アーム10a、10bを備えた基板搬送装置1a、1bにおいて、加熱手段61a、61bは当該アーム部11、12を加熱し、温度検出手段64a、64bは各アーム部11、12の温度を検出する。そして制御手段7は、基板搬送開始前に前記アーム部11、12を加熱し、温度検出手段64a、64bによる温度検出値が予め設定した設定温度範囲まで上昇した後に基板の搬送を許可し、その後は温度検出値が設定温度範囲内に維持されるように加熱手段61a、61bを制御する。
(もっと読む)
ロボットの制御装置
【課題】ロボットの周囲の人物が、ロボットの無線環境の状態を認識することができるロボットの制御装置を提供する。
【解決手段】無線基地局1を介して管理用コンピュータ3との間で相互に情報を送受信すると共に、所定の移動領域において自律的に移動するロボットRの制御装置9は、ロボットRの存在する位置の無線強度が予め定められた複数のレベルのうちのいずれであるかを判別し、判別された無線強度のレベルを報知する無線強度報知制御部90を備える。無線強度報知制御部90は、判別された無線強度のレベルに基づいて、耳部に設けられた耳部表示部8a,8bの点灯状態を制御する耳部表示制御部91と、ロボットRの移動中に無線強度が低レベルである場合に、耳部表示部8a,8bの点灯状態に連動してロボットRの歩行速度を低減させる移動速度制御部92と、その旨を音声により報知する音声報知制御部93とを有する。
(もっと読む)
物体把持を行うロボット及びロボットによる物体の把持方法
【課題】ロボットによる物体把持動作の正確性を向上させる。
【解決手段】ロボット1は、物体50を把持する手部124を有する腕部12、物体50を撮像してステレオ画像を得るステレオカメラ101、物体50の赤外線反射スペクトルを計測するための赤外線光源125及び赤外線センサ126、ステレオ画像を用いて物体50の形状を推定する形状推定部111、赤外線反射スペクトルを用いて物体50の材質を推定する材質推定部112、並びに、物体50の形状及び材質に適応した腕部12の動作内容を決定する動作計画部115を備える。
(もっと読む)
マニピュレータ制御システム、マニピュレータ制御方法およびプログラム
【課題】重量が未知の把持対象物をマニピュレータが把持する際に、マニピュレータから把持対象物が滑り落ちることなく、かつ把持対象物がもろい物でも破壊せずに確実に把持・移動できるようにする。
【解決手段】このマニピュレータ作業支援システムは、マニピュレータ11の把持部10に設けられた成分分析装置13により非接触で計測された材質と、把持部10に設けられた形状計測センサ14により非接触で測定された3次元形状データと物体情報データベース43bのデータを基に対象物Aの重量を算出し、算出した対象物Aの重量から把持部10が対象物Aを把持するための把持力を算出する形状計測処理用PC42と、この形状計測処理用PC42により求められた把持力にてマニピュレータ11を動作させる制御用PC41とを備える。
(もっと読む)
脚式ロボットの歩行制御方法
【課題】 脚式ロボットの歩行制御に関して目標の歩行方向及び歩行速度に追従することが可能で,かつ少ない計算処理で自在な歩行が行える脚式ロボットの歩行制御方法を提供する.
【解決手段】 脚式ロボットの加減速,歩行に伴う体幹の横揺れ,重心等の高さを制御するために必要となる力を個別に求め,それらの力にロボットの姿勢を加味して歩行中の支持脚の伸長力の制御を行う.その際目標の歩行方向に沿った鉛直面をSagittal面として定義する.また遊脚の着地に関して目標の歩行速度と現在の速度との偏差等を用いて遊脚の着地目標位置を決定する.
(もっと読む)
手持操作器
【課題】オペレータが手持操作器による手動運転操作中に、緊急に非常停止としなければならなくなった場合でも簡単かつ確実に非常停止を行なえる手持操作器を提供する。
【解決手段】手持操作器に対する衝撃を検知するショックセンサ14を有し、ショックセンサ14による衝撃検知に基づいて可動部37の非常停止を行なう非常停止装置13を備える。
(もっと読む)
教示装置、コントローラ、自動機械システム、およびその無線通信方法
【課題】無線化された教示装置において、無線通信で一定周期毎にLIVE信号をやり取りし、その受信時間間隔を監視して、無線通信の通信状態が悪化している場合には、作業者に警告を発したり、自動機械を停止させたりすることで、安全な自動機械システムを提供する。
【解決手段】1つ以上の駆動機構を備える機構部と、前記機構部を駆動制御するコントローラ2と、前記機構部を操作する教示装置3を備える自動機械システムにおいて、前記教示装置3は、前記コントローラ2との無線通信を行う教示装置通信部と、前記教示装置通信部で一定周期毎にLIVE信号を監視する第1のLIVE信号監視部とを備え、前記コントローラ2は、前記教示装置との無線通信を行うコントローラ通信部と、前記コントローラ通信部で一定周期毎にLIVE信号を監視する第2のLIVE信号監視部と、前記コントローラ通信部にて受信した前記教示装置からの指令信号に基づいて前記機構部を駆動する駆動部とを備える。
(もっと読む)
モデル加工方法およびモデル加工システム
【課題】色彩を施したクレイモデルの作製を正確に短時間で行うこと。
【解決手段】このモデル加工システム100は、先端に塗装ヘッド106を備えた多軸アームロボット1と、クレイモデルMのハンドワーク側の形状を取得するカメラ2と、CAD/CAM装置5と、多軸アームロボット1のプログラミング等を行うコンピュータ装置6と、多軸アームロボット1のドライブユニット7とを有する。CAD/CAM装置5は、カメラ2で取得したハンドワークの形状と色とに係わるデータを反転させて、反転着色情報を取得し、この反転着色情報に対応した塗装用の加工パスを生成し、多軸アームロボット1の塗装ヘッド106によりクレイモデルMを塗装する。
(もっと読む)
ディスプレイを備えたロボット
【課題】ロボットの動作状態を人に違和感なく感覚的に伝えることができるようにする。
【解決手段】ロボットに取り付けた温度センサ2で検出した温度により、ロボットの動作速度や加速度の動作パターンを自動的に変化させ、動作パターンの補正量の大きさに応じてディスプレイ6の背景色を段階的に変化させる。また、動作コマンドなど人に直接的に伝える必要があるものは、背景色の前面に表示させる。
(もっと読む)
物品把持装置、物品の把持不良の検出方法、及び、把持部材
【課題】ワークが斜めの状態で把持される等の把持不良を検出するための新規な技術を提案する。
【解決手段】物品(ワーク10)を規定の支点2a〜2dで把持するための複数の把持部材(フィンガー2A・2B)を具備し、前記各フィンガー2A・2Bには、前記各支点2a〜2dの温度を検知するためのセンサ3a〜3dが設けられる構成とする。また、前記各センサ3a〜3dにて前記各支点2a〜2dの温度を検知するとともに、図示せぬ制御装置によって、前記各支点2a〜2dにおける温度と規定の閾値とを比較し、前記温度が前記閾値を超えたときに、把持不良を検出するものとする。
(もっと読む)
1 - 20 / 32
[ Back to top ]