
Fターム[3C007KV00]の内容
マニピュレータ、ロボット (46,145) | センサの方式 (946)
Fターム[3C007KV00]の下位に属するFターム
パルスエンコーダ(例;回転式、直線式) (130)
電気式(例;静電容量) (195)
磁気式、電磁式(例;渦電流) (43)
電波式(例;GPS) (70)
回転変圧器方式 (10)
光電式 (348)
流体式(例;密閉袋内の圧力検知) (24)
音響式(例;超音波式) (110)
機械式(例;ダイヤルゲージ) (4)
Fターム[3C007KV00]に分類される特許
1 - 12 / 12
水平多関節ロボット及び水平多関節ロボットの制御方法
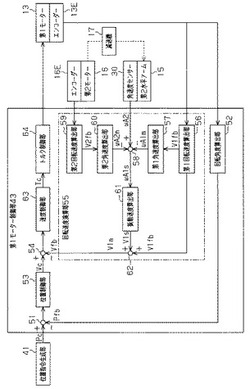
【課題】制振制御に用いられる角速度センサーの数を低減するとともに該角速度センサーに接続される電気配線に要求される耐久性を低くした水平多関節ロボット及び水平多関節ロボットの制御方法を提供する。
【解決手段】ロボットは、基台に連結される第1水平アームと、第1水平アームを介して前記基台に連結される第2水平アーム15と、各アームを回転させる第1及び第2モーター13,16と、各モーターの回転角度及び回転速度を算出するための第1及び第2エンコーダー13E,16Eとを有している。第1モーター制御部43は、角速度センサー30が検出したセンサー角速度ωA2から第1及び第2エンコーダー13E,16Eに基づく第1及び第2角速度ωA1m,ωA2mを減算し、演算結果である振動角速度ωA1sに基づく振動速度V1sと第1回転速度V1fbとの加算した速度計測値が速度指令Vcとなるように第1モーター13を制御する。
(もっと読む)
ロボット

【課題】駆動部や腕部が振動するときにも角速度検出部が振動し難いロボットを提供する。
【解決手段】第1腕部8と、第1腕部8を回転させる第1モーターと、第1腕部8が回転する角速度を検出する第1角速度センサー26と、第1腕部8から第1角速度センサー26に伝わる振動を減衰させる減衰容器23及び減衰容器蓋部23aと、を有する。そして、減衰容器23及び減衰容器蓋部23aは減衰部材を有し、減衰部材が第1腕部8と第1角速度センサー26との間に配置される。
(もっと読む)
角速度または角度の検出方法及びロボットの制御方法
【課題】ドリフト現象による誤差と感度の変動による誤差とを較正する方法を提供する。
【解決手段】角速度センサーを用いた角度検出方法にかかわる。角速度センサーの姿勢を第1姿勢から第2姿勢へ変更し、その間の角速度センサーの出力を積分した第1出力積分16aと変更に要した第1経過時間17とを検出する。角速度センサーの姿勢を第2姿勢から第1姿勢と同じ姿勢の第3姿勢へ変更し、第1姿勢から第3姿勢13へ変更する間の角速度センサーの出力を積分した第2出力積分16bと第1姿勢から第3姿勢へ変更する間の第2経過時間18とを検出する。第2出力積分16bを第2経過時間18にて除算してオフセット補正係数を演算する。第1出力積分16aからオフセット補正係数と第1経過時間17との乗算値を引き算した第1正味出力積分19aを演算し、第1姿勢と第2姿勢との回転角度の差を第1正味出力積分19aにて除算して感度係数を演算する。
(もっと読む)
多関節マニピュレータの先端位置制御方法および多関節マニピュレータ
【課題】多関節マニピュレータの先端を所定の位置に精度よく位置制御することのできる多関節マニピュレータの先端位置制御方法を提供する。
【解決手段】軸回りに回転する複数の関節軸2,4と、これらの関節軸2,4からその径方向に延伸する複数のアーム1,3とを備えた多関節マニピュレータ5の先端を位置制御する方法であって、アーム1,3の各先端部に装着されたジャイロセンサ9,10の出力から関節軸2,4の回転角度と回転速度を求めて多関節マニピュレータ5の先端を位置制御するようにした。
(もっと読む)
ロボットの制御プログラム構築方法およびロボットシステム
【課題】 生活空間において,移動ロボットが種々の物品の把持や,会話による動作など,多様な動作を実現するためのロボット制御プログラムの作成において,プログラムの複雑化を抑制し,操作者の負担を軽減できるプログラミング環境を提供する。
【解決手段】 物品の把持シーケンスプログラムを,データベースの物品情報ごとに記憶し,ロボット10の制御プログラムの実行時に,把持対象物品の電子タグ情報を電子タグリーダ13で読み取り,その電子タグ情報をキーとしてデータベースより該物品の把持シーケンスを取得し,ロボット制御プログラムに挿入する,という手順で処理する。
(もっと読む)
移動ロボットの制御装置および移動ロボットシステム
【課題】外界センサにもとづく位置推定処理の遅れの影響を軽減し,目標位置への正確な位置決めを可能とし,多くの外界センサや位置推定処理アルゴリズムを利用可能であり,なおかつ追加コストのかからない移動ロボットの制御装置を提供する。
【解決手段】外界センサによる環境計測時の推定現在位置を記憶する計測推定位置記憶部を備え,記憶した環境計測時の推定現在位置と前周期の推定現在位置とを利用して外界センサにもとづく位置推定結果を補正する。
(もっと読む)
物体把持を行うロボット及びロボットによる物体の把持方法
【課題】ロボットによる物体把持動作の正確性を向上させる。
【解決手段】ロボット1は、物体50を把持する手部124を有する腕部12、物体50を撮像してステレオ画像を得るステレオカメラ101、物体50の赤外線反射スペクトルを計測するための赤外線光源125及び赤外線センサ126、ステレオ画像を用いて物体50の形状を推定する形状推定部111、赤外線反射スペクトルを用いて物体50の材質を推定する材質推定部112、並びに、物体50の形状及び材質に適応した腕部12の動作内容を決定する動作計画部115を備える。
(もっと読む)
マニピュレータ制御システム、マニピュレータ制御方法およびプログラム
【課題】重量が未知の把持対象物をマニピュレータが把持する際に、マニピュレータから把持対象物が滑り落ちることなく、かつ把持対象物がもろい物でも破壊せずに確実に把持・移動できるようにする。
【解決手段】このマニピュレータ作業支援システムは、マニピュレータ11の把持部10に設けられた成分分析装置13により非接触で計測された材質と、把持部10に設けられた形状計測センサ14により非接触で測定された3次元形状データと物体情報データベース43bのデータを基に対象物Aの重量を算出し、算出した対象物Aの重量から把持部10が対象物Aを把持するための把持力を算出する形状計測処理用PC42と、この形状計測処理用PC42により求められた把持力にてマニピュレータ11を動作させる制御用PC41とを備える。
(もっと読む)
移動装置
【課題】移動装置において、高価なセンサを用いることなく移動体の移動方向角を正確に検出することを可能にし、低コストな構成で移動体の移動方向を正確に制御可能にする。
【解決手段】移動体は、障害物センサとジャイロを搭載しており、制御部の制御により障害物を回避しながら、移動方向角を検出しながら移動する。移動体が初期方向角0(rad)を基準とし移動方向角が0(rad)となる方向に向けて移動を開始し(S1)、検出された移動方向角が誤差を含むようになりB(rad)になると(S2)、基準の向きの0(rad)とは異なる向きに移動する。移動体の周辺に障害物が検知されると(S3:右に障害物,左に障害物)、制御部は、障害物回避動作を行うと同時に、検出された移動方向角B(rad)を、所定の補正値A(rad)を加算又は減算することにより補正する(S41,S42)。この補正は障害物回避動作が行われる毎に行われる。
(もっと読む)
ロボット装置
【課題】 ロボットが外界と多様な物理インタラクションを行なった際にも、体の任意箇所における接触状態と作用力をともに計測する。
【解決手段】 各関節アクチュエータにおける現在の位置、速度、発生力を計測するとともに、機体上の1箇所で加速度及び角速度を計測する。機体上の外界との接触状態を検出して、外力の作用点を特定して、操作空間上でダイナミクス演算により操作空間慣性逆行列及びバイアス加速度を求めることにより、運動方程式上の既知項を算出し、操作空間慣性逆行列及びバイアス加速度の間に前記運動方程式に合致する関係が成立するように、外力の作用状態を推定する。
(もっと読む)
施工支援方法及び施工支援システム
【課題】据付位置の提示からマーキングまでの自動化を可能とする。
【解決手段】施工現場における所定の施工対象に設置物を据付けるための据付位置を提示してマーキングする施工支援システムにおいて、設置物の据付け作業を行う施工現場の任意の位置に設置され、設計図面における据付位置の三次元座標である設計座標情報に基づいて該据付位置を視準して視準先を内蔵されたレーザポインタで提示すると共に提示位置を三次元計測する三次元計測器12と、施工現場に移動自在に配置され、三次元計測器12から転送された提示位置の三次元座標情報及び自分の位置情報に基づいて前記提示位置に移動して、該提示位置にスタンプ44で印をマーキングするマーキングロボット14と、を備えた。
(もっと読む)
物品取扱いシステムおよび物品取扱いサーバ
カメラなどのセンシング手段(1)は、家庭などの生活空間における物品や、人を含む移動体の状況をセンシングする。物品管理・操作サーバ(2)はセンシング手段(1)の情報から、各物品について、現在位置、操作者などを含む属性情報を物品データベース(3)に管理する。そしてサーバ(2)は、操作手段(4)から入力されたユーザの指示を受け、この指示を、物品データベース(3)を参照して制御コマンドに変換し、生活支援ロボット(5)に送信する。 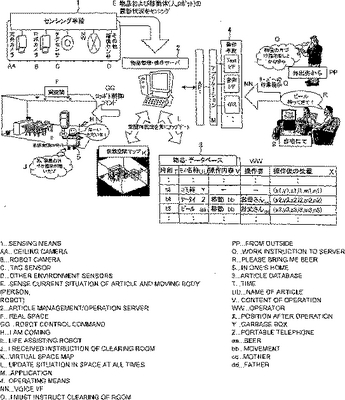 (もっと読む)
(もっと読む)
1 - 12 / 12
[ Back to top ]