
Fターム[3C007LS00]の内容
マニピュレータ、ロボット (46,145) | 教示(プログラム作成) (978)
Fターム[3C007LS00]の下位に属するFターム
直接教示(オンライン・ティーチング) (244)
間接教示(オフライン・ティーチング) (205)
模擬マニピュレータを用いた教示 (7)
プログラムの修正(例;位置決め点修正) (106)
経路や目標位置の自動作成 (243)
確認運転 (26)
シミュレーション (134)
Fターム[3C007LS00]に分類される特許
1 - 13 / 13
移動体姿勢生成方法および移動体姿勢生成装置
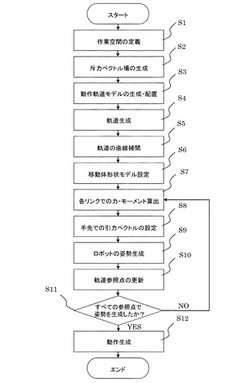
【課題】移動体の一部分がある動作軌道に従って動作する際、従来は移動体全体の姿勢を逆運動学によって生成していたが、計算が複雑であり、また解が多数存在する場合に解を自動的に選択することができない、という問題があった。
【解決手段】作業空間に、空間中の障害物に基づいて設定される斥力ベクトル場を定義し、移動体全体を3次元形状モデル化して表面に代表点を設定し、代表点に斥力ベクトルを作用させることで移動体全体の姿勢を自動生成する。
(もっと読む)
ロボットのタスクモデルの生成及び実行方法と装置

【課題】ロボットサービス設計者に任意のロボットに対する可用行為とロボットが認識可能な周囲環境に関する情報を知らせ、自身が考えるサービスに対してロボットタスクを構成する行為モデルの設計と具現を分離してタスクを生成できるモデルを提供し、この生成されたモデルを用いる場合、サービスに表現された行為の内部を直接具現したり、行為ライブラリを提供するようにロボットタスクを実行できるロボットのタスクモデルの生成及び実行方法とその装置を提供する。
【解決手段】本発明はロボットのタスクモデルの生成及び実行方法とその装置に関し、ロボット行為モデルとこれらの関係を一般化、体系化して知識化するために抽象的モデルの生成と実行過程を分離することは非常に有用であり、ロボット行為とタスクの抽象的な構造のみを考慮し、タスク具現者は必要なタスクライブラリ生成にのみ集中することで、任意のロボットで作動するタスクの安全性と漸進的な拡張及び体系化に多くの利点が得られる。
(もっと読む)
仮想空間と連係した多重ロボット制御装置および方法
【課題】ロボット適用の制約のうちの一つである実際環境の複雑性や動的な面に対する対応性を解決し、ユーザの好奇心の誘発や開発者の創意力を増大させること。
【解決手段】ロボット周辺の環境変化だけでなく、ウェブなどを含む仮想空間上における情報変化によるイベントが発生した場合、発生したイベントに対応する行為データを多数のロボットに送出する仮想空間と連係した多重ロボット制御装置を設け、該当ロボットの個別行為や群集行為を制御できるようにする。
(もっと読む)
ネットワーク基盤のロボットコンテンツ取引システム及び方法
【課題】本発明は、 ロボットの構成及び/または動作のためのコンテンツ(以下、“ロボットコンテンツ”という)をネットワークを利用してロボットユーザ同士間に共有、交換、売買などの方法により取引できるようにするネットワーク基盤のロボットコンテンツ取引システム及び方法を提供するためのものである。
【解決手段】本発明に係るネットワーク基盤のロボットコンテンツ取引システムは、ロボットコンテンツ作成用ソフトウェアプラットフォームを格納し、データ通信に必要とされる通信モジュールを含むように構成されて、ネットワークに連結されたロボットコンテンツ中継端末機と、上記ネットワークを介して上記ロボットコンテンツ中継端末機に連結されており、上記ロボットコンテンツ中継端末機を相対にして上記ソフトウェアプラットフォームで作成されたソフトウェアロボットコンテンツのアップロード及びダウンロードを遂行するロボットコンテンツ取引サーバとを含むことを特徴とする。
(もっと読む)
運動制御システム、運動制御方法および運動制御プログラム
【課題】人間(第1運動体)が接する環境およびこの環境に応じた運動態様と、ロボット(第2運動体)が実際に接する環境とに鑑みて、当該第2運動体の運動を従来技術よりも適切に制御することができるシステム等を提供する。
【解決手段】本発明によれば、人間1の運動態様のうち特徴的部分さえ学習されれば、他の部分が学習されなくても十分であるという思想のもとに人間1の運動態様が学習される。そして、人間1の運動態様のうち特徴的部分さえ再現されれば、他の部分は再現されなくても十分であるという思想のもと、当該学習結果としてのモデルが用いられてロボット2の運動態様が制御される。これにより、人間1の運動態様を規範としながらも当該運動態様に必要以上に拘束されることなく、ロボット2の運動態様が制御される。
(もっと読む)
モーション習得システムおよびその制御方法
【課題】未知の実環境との安定した接触動作を確立すると共に、人間の指のようなモーションを個々に抽出,保存,再現できるようにする。
【解決手段】ロバスト性を保ちつつ制御剛性をゼロにする加速度制御を、外乱オブザーバにより各ロボットシステムのアクチュエータ1に行なう。アクチュエータ1の外乱加速度θ・・extと加速度応答θ・・resとを、モード加速度変換手段27,28によりモードクオリー行列を用いて直交座標系の非干渉モードにおける加速度外乱m・・extや加速度応答値m・・resに変換する。そして、これらの加速度外乱m・・extや加速度応答値m・・resを基に、非干渉モードの各々に対応した対象物47に対するモーションを抽出する。
(もっと読む)
プログラミング可能な手作業連続再生装置
【課題】プログラミングして、手作業を連続で再生すること。
【解決手段】人間の手のような動作が可能な、手と同じ仕組みと形をしている機械の、丁度骨格となる部分の内側をくりぬいて、肩辺りまで入る長い手袋のような機能を持たせ、そこに人間の手と腕をすっぽりと入れ、手を自由に動かせるようにして、自由なポーズを作り出せるようにする。任意のポーズで静止させ、その度に、例えば足で踏むようなスイッチを踏むたびに、腕や手のポーズを記憶できるようにする。腕や手を任意のポーズで静止させてスイッチを踏むと、腕や手のポーズが記憶されるようにする。腕の動き方も記憶できるようにする。それらのポーズを、コンピュータープログラムと同じ様に、条件分岐や繰り返し文やルーチンにジャンプなどを組み合わせることが出来る様にする。すると、様々な手の動作(例えば、掴む、離す、押す、引っ張る、持ち上げる、等)を連続で再生することが可能になる。また遠隔操作も出来るようにする。
(もっと読む)
二次元コード検出装置及びそのプログラム、並びに、ロボット制御情報生成装置及びロボット
【課題】 物体に記された二次元コードを検出し、三次元空間上の物体の位置、姿勢を認識するとともに、その物体に対応する制御情報を生成することが可能な二次元コード検出装置を提供することを目的とする。
【解決手段】 二次元コード検出装置1は、カメラCが撮像した撮像画像を入力する画像入力手段2と、撮像画像を解析し、撮像画像内に写った二次元コードMの固有のパターンに基づいて、二次元コードMの位置及び姿勢を示す位置・姿勢情報を算出するとともに、二次元コードMに符号化された情報を復号する画像解析手段4と、位置・姿勢情報と復号情報とに基づいて、二次元コードMが記された物体に対応した制御情報を生成する制御情報生成手段5と、を備えていることを特徴とする。
(もっと読む)
人型ロボットのための拡張可能なタスクエンジンフレームワーク
人型ロボットのための拡張可能なタスクエンジンフレームワークである。ロボット命令は、タスク310A,310B,310C及びスキルとして格納される。タスク310A,310B,310Cは、異なる構成を有する様々なロボットによって実行可能に設計されている。タスク310A,310B,310Cは、ゼロ以上のスキルを参照可能である。スキルは、特定の構成のロボットのために設計可能である。タスクは、ロボット間で移送可能である。特定のロボットで実行される場合には、タスクは、そのロボットの能力を利用可能な一以上のスキルに対する呼び出しを実行する。 (もっと読む)
ロボット、ロボット制御システム、およびそのプログラム
【課題】 ロボット制御プログラムにネットワークから新たな制御プログラムモジュールを追加できるロボット、ロボット制御システム、およびそのプログラムを提供する。
【解決手段】 ネットワークから新たなロボット制御プログラムモジュール(シナリオ)を受信するシナリオ受信手段74と、受信したシナリオを組み込むシナリオ登録手段73と、予めロボットに組み込まれているシナリオと追加したシナリオ群から実行するシナリオを選択するシナリオ選択手段75と、選択したシナリオを実行するシナリオ実行手段76と、を有する。
(もっと読む)
タスクスキル生成装置
【課題】
ロボットに人の器用さを実装するためのタスクスキルをモデル化し、タスクスキルを生成するための制御方式を定義し、タスクスキルに必要な制御パラメータを抽出し、タスクスキル動作手順を抽出し、対象作業に適したタスクスキルの生成を実現する。
【解決手段】インピーダンスと力のハイブリッド制御を利用したタスクスキル生成装置1およびインピーダンス制御を利用したタスクスキル生成装置1を利用して、操作者が対象作業を動作入力・提示装置12と力センサ13を使ってスレーブ装置11のロボット2を遠隔操作し、その遠隔操作結果からタスクスキル生成に必要なタスクスキル動作手順、タスクスキルのモデルに基づいた初期条件、タスクスキル動作(インピーダンスと力のハイブリッド制御のパラメータ、インピーダンス制御のパラメータ)、終了条件を抽出する。
(もっと読む)
ロボット制御装置およびロボットシステム
【課題】複数台のロボットで構成されるロボットシステムにおいて、各ロボットの動作を総合的かつ容易に制御することができるグラフィック言語を備えるロボットシステムを提供する。
【解決手段】複数台のロボットと、ロボットプログラムに基づいて制御するロボット制御装置10と、ロボット制御装置10に接続されロボットプログラムを表示するロボット教示装置11とからなり、ロボット制御装置10は1台以上のロボットを同時に制御するロボットシステムにおいて、1台以上のロボットを任意に組み合わせて1つのユニットを定義するユニット登録部1と、ユニット毎にタスクを割り当てるタスク登録部2と、タスク毎にロボットプログラムをグラフィックプログラムとして作成可能とするグラフィック言語処理部3とを備える。
(もっと読む)
ロボットを制御するためのシステム及び方法
本発明は、高レベルプログラミング言語を用いてロボット(41)を制御するためのコンピュータ実行システム及び方法を提供する。本発明は、3つのプログラミング言語、即ち、2つの高レベル言語と1つの低レベル言語とを規定する。第1高レベルプログラミング言語は、本発明においては、ロボットシナリオ言語(RSL)(20)と呼ばれ、エンドユーザ(18)はその言語で高レベル行動及びアクションに関連するロボットプレゼンテーション(40)をつくり出すことができる。第2高レベル言語は、本発明においてはロボット行動言語(RBL)と呼ばれ、ロボット(41)のハードウェアを直接制御するための低レベル言語コマンドに高レベル(RSL)言語で各々の高レベル行動又はアクションをどのように変換又はマッピングするかについて記述するためのテンプレートを有する。本発明では、低レベル言語をロボットハードウェア言語(RHWL)という。 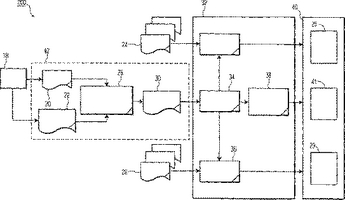 (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]