
Fターム[3C007LT00]の内容
マニピュレータ、ロボット (46,145) | 位置制御 (995)
Fターム[3C007LT00]の下位に属するFターム
補間、経路制御 (138)
外界計測センサを用いた位置制御 (283)
倣い制御 (34)
追従制御 (87)
位置の補正 (291)
原点位置決め、座標較正 (123)
作業開始点への位置決め(再開点も含む) (23)
Fターム[3C007LT00]に分類される特許
1 - 16 / 16
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
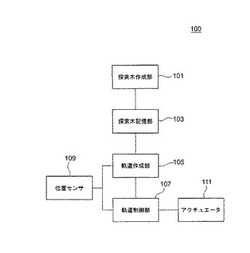
【課題】物体の種々の初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コストで求めることのできる軌道計画システム、及び求めた軌道にしたがって目標状態までの軌道を制御することのできる軌道計画・制御システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、該目標状態に至るまでの状態を枝として、予め区分された状態空間の複数のセルのそれぞれに一つの枝を有する探索木を予め作成する探索木作成部(101)と、該探索木を記憶する探索木記憶部(103)と、該物体の現在の状態を求め、該現在の状態に対応する該探索木の枝を求め、該現在の状態に対応する該探索木の枝から該根までの探索木上の経路を、物体の軌道として求める軌道作成部(105)と、を備える。軌道計画・制御システムは、さらに目標状態までの軌道を制御する軌道制御部(107)を備える。
(もっと読む)
マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ

【課題】冗長関節を有するマスタスレーブマニピュレータであっても逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置10の操作部11に、スレーブアーム31の冗長関節の駆動量を操作者が指令するための操作部材としての第1ロール関節102を設ける。スレーブアーム31が冗長関節を有していない場合には、スレーブアーム31の全体としての逆運動学を解くことによって各関節の駆動量を求める。また、スレーブアーム31が冗長関節を有している場合には、先端の冗長関節202がないものとして逆運動学を解くことによって冗長関節202以外の関節の駆動量を求める。冗長関節202についてはマスタ操作入力装置10からの指令値に対応した駆動量とする。
(もっと読む)
7軸多関節ロボットの制御方法、制御プログラム及びロボット制御装置
【課題】7つの関節のうち基端側にある3つの関節の各回転軸のうち少なくとも1軸が他の軸と一点で交わらない機構を持った7軸多関節ロボットを人間の腕のように滑らかに動作させる制御を適切に実現する。
【解決手段】基端から先端に向かって順に設けられた7つの関節を具備し、当該7つの関節が次の関節を旋回させる回転軸と次の関節を回動させる回転軸とを交互に有しており、かつ当該基端側にある3つの関節の各回転軸が一点で交わらないように構成された7軸多関節ロボットの制御方法であって、前記3つの関節のうち中間関節の回転軸を肩とみなした場合の擬似的な肘角度が一定となるような前記中間関節の関節角を拘束条件に用いて逆変換を実行する(ステップS505)。
(もっと読む)
ロボット制御装置の補正パラメータ同定装置
【課題】減速機角度伝達誤差によるうねりを補正する。
【解決手段】ロボットの手先部に発生するうねりの振幅を求める手段と、複数の関節の所定の関節Jiに対応するうねりの振幅値Diを求める手段と、所定の関節Jiをモータの位置指令θrefiで単軸動作させた際に、関節の軸に現れる位置フィードバック信号Biを計測する手段と、関節Jiに対する位置指令値θrefiに振幅Cのうねりを重畳的に加え、更に、他の軸Jxに位置指令θrefxが加えたと仮定した場合に、手先位置において発生するうねりC’iを計算する手段と、Ai=(Ci/C’i)×Diという式に従って、Biに対応するAiを求める手段と複数のロボットに対して、以上の各手段を用いて、Biに対応するAiを求める手段とを備える、ロボット制御装置の補正パラメータ同定装置。
(もっと読む)
パラレル型リンクロボットにおける関節角の誤差検知装置
【課題】パラレル型リンクロボットにおいて、その関節角を検出する検出部の検出誤差を的確に検知する。
【解決手段】n角形リンク機構(nは4以上の整数)を有するパラレル型リンクロボットにおいて、関節角の検出部における検出誤差を検知する誤差検知装置であって、n角形リンク機構を構成する関節部のうち、n−1個の関節部における関節角をそれぞれ検出する関節角検出部と、n角形リンク機構の構造的条件の下、該n角形リンク機構の各リンク部材の長さと、関節角検出部によって検出されたn−1個の関節部の関節角とに基づき、関節角における角度誤差に関するパラメータを取得する角度誤差パラメータ取得部と、角度誤差パラメータ取得部によって取得されたパラメータに基づいて、n−1個の関節部のうち何れの関節部において角度誤差が生じているかについての判断を行う誤差判定部と、を備える。
(もっと読む)
情報処理システム及び情報処理方法、ロボットの制御システム及び制御方法、並びコンピュータ・プログラム
【課題】関節などの物理動作を制御する運動制御と、運動制御以外の制御とからなるロボットの制御を同一プラットフォーム上の分散システムとして構築する。
【解決手段】リアルタイム性が要求される複数のモジュールを同一のプロセス内に配置するとともに、モジュール間でメッセージ・パッシングを行なう際に、メッセージ・データのシリアライズ及びデシリアライズが必要か否かを判断するメッセージ・ブローカを各プロセスに配設し、同一プロセス内でのメッセージ・パッシングを高速化し、さらにメッセージ・キューを利用しないメッセージ受信を行なうことでメッセージの同期処理が可能になる。
(もっと読む)
ロボット
【課題】必要な機能を維持しながらも、よりコンパクトに形成されたロボットを提供する。
【解決手段】胴体2と、胴体2に基端が取り付けられるアーム3,4と、アーム3,4の骨格をなすフレーム部材と、フレーム部材に動力伝達可能に連結され、フレーム部材を旋回駆動させるアクチュエータと、フレーム部材とアクチュエータとの連結部においてのフレーム部材の長手方向と重力方向とのなす角度αが90度よりも小さくなるようにフレーム部材の旋回を制限する旋回制限手段とをそなえて構成する。
(もっと読む)
移動ロボットの本体位置決め方法
【課題】移動ロボットが搭載マニピュレータで作業を行う際に、複雑な多関節型の搭載マニピュレータにおいても、簡単な処理により、最適な位置・姿勢でハンドリング作業を行うことができる移動ロボットの位置決め方法を提供する。
【解決手段】マニピュレータの可動範囲を示す立体を水平に切断した複数の水平面内におけるマニピュレータの操作性の評価値の分布データを持ち、移動ロボットが作業を行う際には、マニピュレータの操作性の評価値の分布データから求めたマニピュレータの操作性が良好な点と、移動ロボットの作業点が一致するように移動ロボットのロボット本体の位置決めを行う。
(もっと読む)
フロッグレッグアームロボットおよびその制御方法
【課題】フロッグレッグアームロボットにおける制御上の特異点を実用的に解消するとともに、フロッグレッグアームロボットのスムーズな動作を実現する。
【解決手段】このフロッグレッグアームロボットは、手首回転軸部に接続され、自らが接続された同回転軸部にトルクを供給するトルクモータと、フロッグレッグアームロボットを構成する各腕部が駆動装置によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、トルクが手首回転軸部に、前記各腕部が所望の姿勢に移行することができる方向に供給されるように、トルクモータを電気的に制御する制御部とを備えている。
(もっと読む)
作業補助アーム
【課題】別途にセンサを必要とせず、任意の案内面上に拘束することができる作業補助アームを得る。
【解決手段】3軸の変位量に基づきその作業座標が決定されるアームを設け、3軸をそれぞれ対応した3つの変速機を介して差動機構で結合し、3つの変速機の変速比を、指示された案内面以外へのアーム手先の移動を拘束するよう制御装置41によって制御するようにした作業補助アームであって、3軸の回転角度を検出する回転角度検出器40と、ユーザにより指示された仮想的な案内面を入力する面指示手段42とを設け、制御装置41は、検出された回転角度、及び指示された仮想的な案内面に基づき、現在のアーム手先の位置を含み、かつ前記案内面とは平行ではない補正用案内面を計算する補正用案内面計算手段301を含み、補正用案内面計算手段301により計算された補正用案内面に沿って、前記アーム手先が動くように3つの変速機の変速比を求める。
(もっと読む)
機械運動学的特異点に対する接近および補正
複数のジョイントおよびリンクを備える機械リンク機構を含む多軸機械の操作方法。機械リンク機構は、リンク機構ジョイントによる特異点への接近を検出するために監視される。接近される特異点の度数が求められる。特異点に接近しているジョイントが識別される。仮想ジョイントを用いてマニピュレータ行列中の識別されたジョイントを置き換え、マニピュレータ行列を修正し、修正されたマニピュレータ行列を提供する。修正されたマニピュレータ行列を用いてリンク機構のリンクの位置変更が決定される。この方法は、所与の機械に対する特異点の先見的知識なしに、広範な機械構成のためのソフトウェアベースの補正を実現することができる。 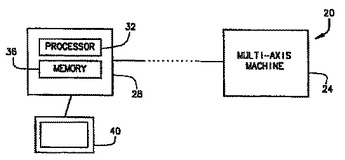 (もっと読む)
(もっと読む)
非ホロノミックマニピュレータ
【課題】 劣駆動マニピュレータは、軽量、低コスト化が見込まれて種々の研究がなされているが、制御が難しく実用化の例は少ない。劣駆動マニピュレータの利点を活かしかつ制御をやさしくするような構成法が課題であった。
【解決手段】 遊星ギアユニットのプラネタリギアキャリアに第一リンクを固定し、リングギアに第二リンクを固定し、これらに第三リンク、第四リンクを追加してパンタグラフを構成する.またサンギア回転軸にアクチュエータを設けた構成とする。こうすると劣駆動マニピュレータでありながら、簡単な比例制御でハンド部を任意の円軌道や任意角度の直径軌道を動かすことができることを確認した。
(もっと読む)
移動装置
【課題】移動装置において、高価なセンサを用いることなく移動体の移動方向角を正確に検出することを可能にし、低コストな構成で移動体の移動方向を正確に制御可能にする。
【解決手段】移動体は、障害物センサとジャイロを搭載しており、制御部の制御により障害物を回避しながら、移動方向角を検出しながら移動する。移動体が初期方向角0(rad)を基準とし移動方向角が0(rad)となる方向に向けて移動を開始し(S1)、検出された移動方向角が誤差を含むようになりB(rad)になると(S2)、基準の向きの0(rad)とは異なる向きに移動する。移動体の周辺に障害物が検知されると(S3:右に障害物,左に障害物)、制御部は、障害物回避動作を行うと同時に、検出された移動方向角B(rad)を、所定の補正値A(rad)を加算又は減算することにより補正する(S41,S42)。この補正は障害物回避動作が行われる毎に行われる。
(もっと読む)
位置制御装置、位置制御方法及び位置制御プログラム
【課題】リンク機構の制御動作を安定化及び高信頼化することができるとともに、リンク機構を高精度に制御することができる位置制御装置を提供する。
【解決手段】データ変換処理部13は、ロボットアーム21の先端部の目標データPから関節角度θを求める解法処理に使用される係数aij及び係数biを浮動小数点データ形式から可変長整数データ形式へ変換し、無誤差制御処理部16は、可変長整数データ形式の係数aij及び係数biを用いて除算を除く加減算及び乗算からなる無誤差演算を実行して係数a6ii及び係数b6iを求め、データ変換処理部13は、係数a6ii及び係数b6iを可変長整数データ形式から浮動小数点データ形式へ変換し、誤差有制御処理部15は、上記解法処理において浮動小数点データ形式の係数a6ii及び係数b6iを用いて1回のみの除算を含む浮動小数点演算を実行することにより浮動小数点データ形式の関節角度θを求める。
(もっと読む)
ロボット制御装置,ロボット制御方法,コンピュータプログラム
【課題】 ロボットが使用される状況に応じて要求される条件を考慮することで、アーム先端を目標位置に移動させるために必要な走行軸の移動量を自動的に決定することができるロボット制御装置を提供する。
【解決手段】 ロボットの制御を行うコントローラは、垂直多関節型で6軸のアームの先端について、現在位置(X0,Y0,Z0)と所定時間後の目標移動量(ΔX,ΔY,ΔZ)とに基づいて決定される目標位置(Xc,Yc,Zc)に対し(ステップS1〜S4)、その時点でアームが保持している第2関節角度θ2と第3関節角度θ3との和が一定となることを拘束条件として、アームの先端を目標位置に移動させるために必要な走行軸上における所定時間当たりの移動量ΔX3を計算する(ステップS5)。
(もっと読む)
関節駆動装置および関節駆動装置の制御方法
【課題】 関節部の制御の正確性を高めながらも、極力、アナログ情報の入力数を低減し得る関節駆動装置を提供する。
【解決手段】 装置のモータ側にエンコーダを接続する一方、関節部側にポテンショメータを接続し、ポテンショメータおよびエンコーダの値を読み込んでメモリに記憶した後(S201、S202)、記憶したポテンショメータの値を関節角度θPに、記憶したエンコーダ3の値を関節角度θEにそれぞれ変換し、その角度差θP−θEを計算する(S203)。角度差と関節部の負荷トルクとの関係を示す負荷トルクデータを予め記憶部に記憶し、その負荷トルクデータと、S203で算出された角度差とに基づいて、関節部の負荷トルクを推定する(S204)。
(もっと読む)
1 - 16 / 16
[ Back to top ]