
Fターム[3C007MS00]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176)
Fターム[3C007MS00]の下位に属するFターム
過負荷に対するもの (98)
干渉に対するもの (375)
機構、構造的に対処するもの (44)
異常、危険発生後の処置 (116)
検査、監視、メンテナンス (114)
誤操作への対応 (26)
マニピュレータの異常に対するもの (142)
人に対する安全 (138)
教示、操作における安全 (69)
作業対象物に対する安全 (43)
Fターム[3C007MS00]に分類される特許
1 - 11 / 11
妨害電磁波制御方法、妨害電磁波制御プログラム及びロボット
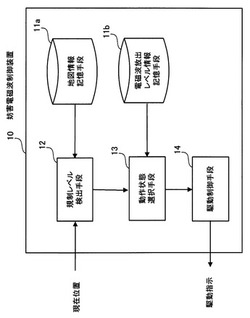
【課題】電磁波放出レベルを抑制する。
【解決手段】規制レベル検出手段12は、対象装置の現在位置を取得し、地図情報に基づいて現在位置を含む対象領域の電磁波規制レベルを検出する。動作状態選択手段13は、形状別電磁波レベル情報及び部位別電磁波レベル情報に登録されている動作状態から検出した電磁波規制レベルに適合する電磁波放出レベルに対応する動作状態を選択する。そして、駆動制御手段14は、選択した動作状態に応じて複数の部位を駆動する駆動指示を出す。
(もっと読む)
セキュリティネットワークロボットサービスを提供する方法及び装置

【課題】各ロボットサービスの主体が安全に通信できるようにするネットワークロボットサービスのためのセキュリティサービス技術を提供する。
【解決手段】ドメイン内に存在する少なくとも1つ以上のクライアントロボット10、12と連結される、前記クライアントロボット10、12と外部サーバ500、600間の共有キーを生成し、前記共有キーを含むキー分配要請メッセージを生成し、前記キー分配要請メッセージを前記外部サーバ500、600に伝送するドメインセキュリティ管理部16と、前記ドメイン外に存在する少なくとも1つ以上の前記外部サーバ500、600及び前記ドメインセキュリティ管理部16とネットワークを介して連結されるルートセキュリティ管理部400とを含むシステムにより、各ロボットサービスの主体が安全に通信できるようにする。
(もっと読む)
制御装置およびそれを用いたロボットシステム
【課題】本発明は、作業者がセキュリティレベルで許可された動作指令のみを有効にする、制御装置およびロボットシステムを提供する。
【解決手段】教示装置3を用いて被制御体を制御する制御装置であって、前記教示装置3と作業者が備えた携帯装置8間が人体通信を用いて行われるとともに、前記通信には、個人認証およびセキュリティレベルを備えたものである。
(もっと読む)
産業用多関節ロボットの安全性評価方法
【課題】産業用多関節ロボットのロボットアームの表皮部材の材料種毎の安全性を的確に評価することができる産業用多関節ロボットの安全性評価方法を提供する。
【解決手段】自重により傾動落下するロボットアームを模擬する模擬落下装置を用い、先ず、衝撃付与工程により、試験用表皮部材11を取り付けた落下手段10を落下させて被衝突体14に衝撃を付与する。次いで、測定工程により、材料種の異なる試験用表皮部材11毎に衝撃荷重を測定する。次いで、評価用データ生成工程により、表皮部材の材料種毎に予め採取された人体骨折相当の衝撃荷重と接触面積との関係を示すデータと、測定工程により測定した試験用表皮部材の衝撃荷重に基づいて、表皮部材の材料種毎の評価用データを生成する。
(もっと読む)
保護部材及び可搬型機器
【課題】可搬型機器の外側面に接触することなく配置することにより、強度設計が容易で交換頻度を増すことなく可搬型機器に作用する衝撃を確実に緩和することができるとともに、保護部材にストラップとしての機能をも備えることができようにし、修理コスト及び製造コストの低廉化を実現する。
【解決手段】可搬型機器10の周囲を包囲する保護部2A〜2Fを腕部3〜8を介して可搬型機器10に接触させることなく配置した。可搬型機器10を落下させた際には床面等に保護部2A〜2Fが衝突し、保護部2A〜2Fに生じた衝撃が腕部3〜8で緩衝されて可搬型機器10に伝わる。
(もっと読む)
少なくとも1つの機械を制御する装置
本発明は、駆動装置と、安全周辺コンポーネントと、機械の制御部と、安全制御部とを備える、産業用ロボットなどの少なくとも1つの機械を制御する装置および方法に関する。このとき安全制御部は、それぞれの機械制御部よりも上位のアクセス権を機械駆動装置と安全周辺装置の両方に有している。それにより、できる限り簡単にコンフィギュレーションされるべき、動作制御ループへの安全制御ループの組み込みが実現される。 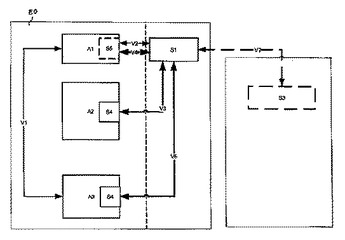 (もっと読む)
(もっと読む)
歩行ロボット
【課題】 歩行ロボットに異常が発生した場合に、その異常に適した異常処理を選択して実行する技術を提供する。
【解決手段】 歩行ロボットは、一対の脚リンクの各脚関節の角度を変化させて歩行する。その歩行ロボットは、歩容データに基づいて各脚関節の角度を調整するコントローラ63と、歩行ロボットに発生した異常を検出するとともに、検出した異常が立脚および遊脚の少なくとも一方の部位で発生したか否かを検出する異常検出手段76を備えている。コントローラ63は、異常検出手段76が異常を検出し、検出した異常が立脚および遊脚のいずれでもない部位で発生した場合に、歩容データに基づく各脚関節の角度調整を継続するととともに、各脚関節の動作速度を減速させながら各足先を所定回数接地させてから、各足先が接地した状態で各脚関節をロックする異常処理を実行する。
(もっと読む)
制御装置
【課題】コントローラと可搬式操作装置とを完全に無線化するとともに、可搬式操作装置が省電力であって、非常停止や無線通信不具合時にも信頼性の高い非常停止措置を行うことができる制御装置できるようにする。
【解決手段】コントローラ1からは一定周期で同一バイト数のデータを送り、可搬式操作装置2はこれに対してデータの変化が有る時は応答データを送り、コントローラ1が正常受信したことを確認し、以後データの変化がない場合はデータの短い確認データを返信することで、バッテリーの消費を防止する。また、コントローラ1と可搬式操作装置2にはそれぞれカウンタ回路13、16を備え、送受信される同一のデータが一定回数カウントされるとコントローラ1の制御対象を非常停止処理するよう構成する。
(もっと読む)
ロボットアームの制御方法
【課題】 柔軟機構を有するロボットアームにおいて、障害物への衝突衝撃を効果的に緩和することを可能としたロボットアームの制御方法を提供する。
【解決手段】 衝突検知部2は、角度センサ68の出力情報を基に角度情報判定部4が判定した角度情報に基づいて逆動力学演算部21と外乱トルク推定部22により外乱トルクを推定して、衝突判定部23により障害物への衝突を判定する。障害物への衝突を判定した場合には、修正運動目標値生成部12は、衝突時の関節角度を基にして運動目標を修正し、指令値調整部13により目標角度または角速度を調整して指令値切換部14から制御指令部3へと駆動モータ60の制御指令を送出する。
(もっと読む)
ロボットの安定化制御装置
【課題】 台車移動型ロボットの転倒を防止しながらアクチュエータを駆動するに当たり、計算量を少なくするとともに、アクチュエータの作動を少なくすることによってマニピュレータにおける無駄なエネルギーを消費しないようにしたロボットの安定化制御装置を提供する。
【解決手段】 安定化制御装置1は、ロボット4の挙動に基づいて、ZMP算出部11で実ZMPを求める。また、ZMP比較部13で、起立状態が不安定となるとして予め記憶したZMP限界値と実ZMPとを比較する。目標角度算出部14では、実ZMPおよびZMP限界値の比較結果に基づいて、ロボット4のZMPの目標変化分を設定する。
(もっと読む)
移動ロボット
【課題】重心が高い位置にもかかわらず急発進または急停止した場合に転倒することを防止する。
【解決手段】移動ロボットが、自装置を移動させるための駆動を行う移動機構部と、移動機構部との間の平面上の方向にリニアガイドにより移動可能に移動機構部と連接されている筐体部と、移動機構部と筐体部の間に設けられ、リニアガイドにより案内される平面上の方向における、移動制御により生じる慣性力または外力を吸収する緩衝器と、を備えた。
(もっと読む)
1 - 11 / 11
[ Back to top ]