
Fターム[3C007NS12]の内容
マニピュレータ、ロボット (46,145) | ワークの状態 (1,085) | 種類 (720) | 基板 (502)
Fターム[3C007NS12]の下位に属するFターム
半導体ウエハ (205)
磁気ディスク、光ディスク (6)
プリント基板、配線板 (19)
Fターム[3C007NS12]に分類される特許
1 - 20 / 272
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
搬送ロボット

【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
基板移載装置
【課題】ベルヌーイチャックで吸引保持した基板を、規制体で所定姿勢に位置保持する基板移載装置において、規制体の規制機能の回復をより少ない手間で簡便に行うことができるようにする。
【解決手段】基板Wの表面に平行な方向の滑り移動を規制するガイド53をガイド取付部材51に対して着脱自在に構成する。これにより、規制体50の全体の交換を要することなく、ガイド53のみを交換するだけで、規制体50の規制機能を回復することができる。従って、規制体50の全体を交換する形態に比べて、規制体50の規制機能の回復に要する費用や手間を抑えることができる。
(もっと読む)
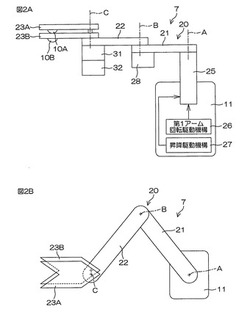
搬送アーム装置
【課題】可動範囲が広く、位置決め精度やメンテナンス性に優れた搬送アーム装置を提供する。
【解決手段】基台2上に基部111を枢設された第1アーム11と、その先端部112に基部121を枢設された第2アーム12と、その先端部122に基部131を枢設されたハンド部13と、第1アーム回動手段6と、第2アーム回動手段7とを有し、基台2に対する第1アーム11および第2アーム12の角度をそれぞれ変化させることでハンド部13の基部131を所定の位置に移動させる搬送アーム装置1であって、第2アーム回動手段7が、基台2上に枢設され第1アーム11と同一の回動中心114を有する回動部材14と、回動部材14と第2アーム12とを連結する連結手段20とを備えており、基台2に対して回動部材14および第2アーム12が同一方向に同一角度連動して回動するように構成した。
(もっと読む)
吸着装置及びロボットシステム
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
基板搬送装置
【課題】2段のピンセットによる搬入出動作を同じタイミングで行い、基板搬送に係る処理時間を短縮する。
【解決手段】基台上に相対向して立設された一対の第一及び第二の昇降軸7,8と、前記第一の昇降軸に沿って昇降自在に設けられると共に、第一のピンセット15をステージに対し進退移動させる第一の進退移動手段13と、前記第一の進退移動手段を前記第一の昇降軸に沿って昇降移動させる第一の昇降手段11と、前記第二の昇降軸に沿って昇降自在に設けられると共に、第二のピンセット16をステージに対し進退移動させる第二の進退移動手段14と、前記第二の進退移動手段を前記第二の昇降軸に沿って昇降移動させる第二の昇降手段12と、前記第一及び第二の進退移動手段の駆動制御、及び前記第一及び第二の昇降手段の駆動制御を行う制御手段19とを備える。
(もっと読む)
物品搬送装置
【課題】ファンを用いて物品を搬送する物品搬送装置において、物品に関わる検出器を可及的に減らせるようにする。
【解決手段】移載装置1、非接触でガラス基板を搬送する装置である。移載装置は、ケース22と、ファン24と、吹き出し口28と、電流値測定部と、ファン制御部30と、を備えている。ケース22は、ガラス基板に対向する物品対向部42を有している。ファン24は、ファンケース54の内部に設けられている。吹き出し部は、物品対向部42に設けられ、ファン24との間で空気を流す。電流値測定部は、ファン24の負荷を検出する。ファン制御部30は、電流値測定部の検出結果によりファン24を制御する。
(もっと読む)
基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法、及び基板位置補正方法
【課題】基板の位置ずれを検出することが可能な基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法を提供する。また、基板位置補正方法を提供する。
【解決手段】基板搬送用ロボットシステム10は、基板Wの下面に接触する接触部PBL、PFL、PBR、PFR及び接触部PBL、PFL、PBR、PFRに接触した基板Wの重心位置を検出するための複数のセンサSBL、SFL、SBR、SFRが設けられた基板搬送用ハンド60を有する基板搬送用ロボット20と、1)基板搬送用ハンド60上の基準となる位置にて基板Wが支持された際の各センサSBL、SFL、SBR、SFRの検出値である基準値と現在の各センサSBL、SFL、SBR、SFRの検出値との差分をそれぞれ演算する差分演算部70及び2)各差分に基づいて基板Wの位置ずれ方向を判断する第1の判断部72を有する第1の制御装置30とを備える。
(もっと読む)
搬送ロボット
【課題】昇降駆動手段において必要となる昇降駆動力を低減することができる搬送ロボットを提供すること。
【解決手段】本発明の搬送ロボットは、第1軸線周りに回転可能に構成された第1リンク部材と、第1軸線に対して所定距離に位置する第2軸線周りに回転可能に構成された第2リンク部材と、第2軸線に対して所定距離に位置する第3軸線周りに回転可能であり且つ物品を保持可能に構成された保持部材と、少なくとも保持部材を昇降駆動するための昇降駆動手段と、を備える。第1リンク部材、第2リンク部材、及び保持部材が、この順番で連結されてアームリンク機構を構成しており、昇降駆動手段が、第1リンク部材と保持部材との間に配置されてアームリンク機構の一部を構成している。
(もっと読む)
真空吸着装置
【課題】真空吸着装置においてワークの設置状況にかかわらず、簡素な構成で前記ワークを確実且つ安定的に吸着することができる。
【解決手段】真空吸着装置10は、負圧流体の供給される供給ポート22を有したボディ12と、該ボディ12の下部に設けられワークWを吸着可能なパッド14と、前記ボディ12とパッド14との間に設けられるシール部材16とを備え、前記パッド14が多孔質体から形成されると共に、前記シール部材16が、前記パッド14に対して剛性が低く形成される。また、パッド14には、該パッド14を平面状に維持する保持プレート26が装着される。そして、例えば、パッド14に対して傾斜したワークWを吸着する際、該パッド14がシール部材16を変形させながら傾斜して前記ワークWに密着する。
(もっと読む)
パネルの搬送装置
【課題】ロボットに保持されたパネルを仮置きすることなく位置検出し直接所定位置に配置するパネルの搬送装置を提供する。
【解決手段】搬送経路に沿って順次送られてくる収容ケース11に、別位置に配置されていたパネル12を載置するパネルの搬送装置10であって、パネル12を吸着保持する吸着パッド13が設けられたロボット14と、吸着パッド13に吸着保持されているパネル12を撮像する第1の撮像手段15と、搬送経路上の停止位置で静止した収容ケース11を撮像する第2の撮像手段16と、第1の撮像手段15によって撮像された画像からパネル基準位置に対するパネル12の位置ずれ量を検出すると共に、第2の撮像手段16によって撮像された画像からケース基準位置に対する収容ケース11の位置ずれ量を検出し、収容ケース11の特定位置にパネル12を載置する吸着パッド13の移動先の座標及び向きを算出する制御手段17とを有している。
(もっと読む)
基板位置検出方法
【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
搬送装置
【課題】リンクアーム機構を有する搬送装置において、特にリンクアーム機構を冷却し、高温状態のワークからの輻射熱の影響を減少させることができる搬送装置を提供する。
【解決手段】搬送装置100は、真空空間内においてワーク200を搬送するためのリンクアーム機構2と、リンクアーム機構2を鉛直軸周りに回転可能に軸支する旋回軸3と、を備える搬送装置であって、リンクアーム機構2は、下段アーム31L・31Rと、下段アーム31L・31Rと連結される上段アーム33L・33Rと、上段アーム33L・33Rの他端と連結されるワーク200を支持する水平移動部材22L・22Rと、を有し、上段アーム33L・33Rと水平移動部材22L・22Rとの間に冷却板25L・25Rを配置した。
(もっと読む)
保持部材の姿勢判定装置、その方法、基板処理装置及び記憶媒体
【課題】 保持部材の姿勢に異常があるか否かを確実かつ容易に検出すること。
【解決手段】 保持部材であるフォーク3Aを前進させたときに、当該フォーク3Aがその前を通過するように、フォーク3Aの進行方向に対して側方にラインセンサ4を設ける。そして、フォーク3Aをラインセンサ4に対して進退させたときに、当該フォーク3Aの上下方向の位置と、フォーク3Aの進退方向の位置とを対応付けたデータを取得する。この取得されたデータに基づいて前記進退方向の位置に対して上下方向の位置を二次微分した値を演算し、この値に基づいて保持部材の姿勢の異常の有無を判定する。
(もっと読む)
基板搬送装置および基板搬送システム
【課題】基板カセットと基板受け渡し先との間でガラス基板の受け渡しを効率良く行うことのできる廉価でコンパクトな構成の基板搬送装置を提案すること。
【解決手段】基板搬送装置2は、ガラス基板7の縁端をクランプしエアー浮上させた状態で、基板カセットからガラス基板7を引き抜くので、狭い間隔で高密度に収納されているガラス基板を引き抜くことができ、エアー浮上状態でガラス基板7を移動させるので、ガラス基板に損傷、異物付着が生じない。基板載置面に引き込まれたガラス基板を基板支持アームで支持し、この状態で基板搬送装置2が収納先の基板カセットまで移動し、基板支持アームによってガラス基板を引き渡し先に渡す。一台で基板カセットからのガラス基板の引き抜き、移送、基板受け渡し先への引き渡しを行うことができ、設置スペースが少なくて済む廉価でコンパクトな基板搬送システムを構築できる。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
リンク式ロボットアーム装置
【課題】アームの制御性低下を効果的に抑制するとともに、吸着ON・OFF状態の切替応答性が向上するリンク式ロボットアーム装置を提供する。
【解決手段】アームの先端側に配置され且つ吸着用エア供給口C3を有するエンドエフェクタCによって搬送対象物を吸着保持可能なリンク式ロボットアーム装置Xとして、アーム1の内部に設けたエア管4を介して吸着用エア供給口C3に接続され、吸着用エア供給口C3に吸着用エアを供給可能な状態と、吸着用エア供給口C3への吸着用エア供給を停止する状態との間で切替可能な吸着切替ユニット3を備え、この吸着切替ユニット3を、アーム1のうちアーム長1Lの半分1Cよりもシータ軸J3に近い位置に設けた。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、振動吸収体6の先端部に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
非接触吸着装置
【課題】面状部材を安定且つ位置ずれの少ない状態で非接触吸着して面状部材へのストレスを低減できると共に簡易な構成で安価に実現できる非接触吸着装置を提供する。
【解決手段】基体1から噴出する流体による負圧により面状部材4を非接触吸着する非接触吸着装置であって、基体1の一側は凹部5が設けられ、凹部5には前記流体を噴出する第一流体噴出部6が設けられ、凹部5の周囲には面状部材4を非接触吸着する非接触吸着部2が設けられ、凹部5内にして第一流体噴出部6にはガイド体7が対設され、第一流体噴出部6から噴出した流体が前記ガイド体7により外方向に案内され、非接触吸着部2を通過することで生ずる負圧により面状部材4が非接触吸着部2に非接触吸着されるように構成されている。
(もっと読む)
産業用ロボット
【課題】水平方向におけるハンドおよびアームの位置調整が可能であっても小型化することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向に移動可能に支持する柱状部材7とを備えている。柱状部材7は、支持部材6を保持する柱部18と、柱部18を保持する柱部17とを備えている。柱部17、18は、鉛直方向に対して互いに逆方向へ傾斜している。柱部18は、その傾斜方向への支持部材6の相対移動が可能となるように支持部材6を保持し、柱部17は、その傾斜方向への柱部18の相対移動が可能となるように柱部18を保持している。
(もっと読む)
1 - 20 / 272
[ Back to top ]