
Fターム[3C007XF00]の内容
マニピュレータ、ロボット (46,145) | マニュアルマニピュレータの構成、目的 (101)
Fターム[3C007XF00]の下位に属するFターム
関節を有するもの (14)
可撓性のもの (4)
支持体への取付装置を持つもの (5)
工具ハンド (14)
保持ハンド (47)
受皿ハンド (1)
駆動機構を有するもの (14)
Fターム[3C007XF00]に分類される特許
1 - 2 / 2
真空ピンセットおよび真空吸着方法
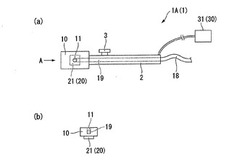
【課題】手作業による操作ミスがあったとしても被処理体の吸着ミスを防止し、確実に吸着・脱着動作を行うことが可能な真空ピンセットを提供する。
【解決手段】本発明の真空ピンセットは、長尺状の本体2と、前記本体の一端部に設けられ、平板状の被処理体を吸着し保持する第一機能部10、および、前記被処理体とは異なる対象物の有無を識別する第二機能部20と、を少なくとも備えた真空ピンセット1A(1)であって、前記第二機能部における前記対象物の有無の識別結果に基づき、前記第一機能部における前記被処理体の吸着条件を切り替える制御手段30を有すること、を特徴とする。
(もっと読む)
医療用マニピュレータ

【課題】マニピュレータを電気メスとして使用する場合であっても、先端動作部での通電経路を適切に確保して、その動作や手技を円滑に行うことができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、ワイヤ80bの進退駆動によって従動回転される歯車体126等により、少なくとも軸線方向を中心とするロール方向への回転動作が可能な先端動作部12を備える。先端動作部12は、高周波電源23から、第1通電経路E1及び第2通電経路E2を介してそれぞれ通電されることにより、その間で生体に通電可能な一対のグリッパ部材308、309を有する。先端動作部12における第1通電経路E1及び第2通電経路E2は、ロール方向へと先端支持部材161と共に回転可能なスリップリングR1、R2を含む第1構造部S1と、第1構造部S1より基端側に設けられて通電ピンP1、P2を有し、ロール方向には回転しない基端部材402を含む第2構造部S2とを備える。
(もっと読む)
1 - 2 / 2
[ Back to top ]