
Fターム[3C007XG00]の内容
マニピュレータ、ロボット (46,145) | マイクロマニピュレータの構成、目的 (116)
Fターム[3C007XG00]の下位に属するFターム
駆動源 (26)
走行機構を有するもの (8)
基台 (3)
アーム (10)
ハンド (37)
操作部 (17)
ワークに対し非接触で処理するもの (10)
Fターム[3C007XG00]に分類される特許
1 - 5 / 5
カラーフィルタ基板修正装置
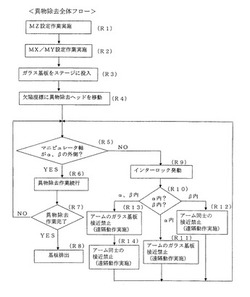
【課題】カラーフィルタ基板にダメージを与えることなく、更に、アーム同士の干渉によるアームの破損を防いで異物欠陥を除去することを可能とするカラーフィルタ基板修正装置を提供する。
【解決手段】異物検査装置によって検出された異物の所在情報に基づいてカラーフィルタ基板に付着した異物を除去するカラーフィルタ基板修正装置であって、カラーフィルタ基板を載置するステージと、異物を撮像する撮像カメラと複数のマイクロマニピュレータとマイクロマニピュレータに備えられその先端で異物を除去する複数のアームとを備えた異物除去ヘッドと、前記異物除去ヘッドを移動する移動手段と、複数のアームを移動する移動手段と、複数のアームとカラーフィルタ基板の接触を防ぐ干渉防止手段その1と、複数のアーム同士の接触を防ぐ干渉防止手段その2と、を有することを特徴とするカラーフィルタ基板修正装置。
(もっと読む)
マイクロマニピュレータ

【課題】 先端で微細加工が可能なマイクロマニピュレータを提供する。
【解決手段】 アームホルダ2に保持されるアーム3と、前記アーム3の先端に備えられたモータホルダ4と、前記モータホルダ4に固定された小型モータ5と、から構成され、前記小型モータ5の出力軸6はダイヤモンドで形成され、その先端にレーザ加工を行い、ドリル刃7を形成することにより、穴あけや切削等の微細加工が可能となり、また、ドリル刃の芯出し精度を考慮する必要が無くなり、より高精度な加工が可能となる。
(もっと読む)
5度の自由度を持つ、キャリヤ用移動プラットホーム
【課題】キャリヤ及び間隔が隔てられた少なくとも三つのクランプ手段を含む移動プラットホームを提供する。
【解決手段】クランプ手段の各々は、キャリヤを、接触点のところで、及びキャリヤの少なくとも一つのグローブ状接触面のところでクランプし、少なくとも一つのクランプ手段には、キャリヤを少なくとも二つの仮想軸線を中心として回転できるように、接触点を、少なくとも夫々の接触面及び/又は少なくとも夫々のクランプ手段に対して変位するための少なくとも一つの変位エレメントが設けられており、クランプ手段によってキャリヤに加えられる法線力は、ほぼ平行な平面内にあり、これらの平行な平面は、夫々の接触点でのグローブ状表面の接線方向平面に対してほぼ垂直である。
(もっと読む)
試料観察装置,集束イオンビーム装置
【課題】
真空装置内でプローブを操作するマニピュレータにおいて、小型で広範囲に移動でき精度が高く、かつマニピュレータの駆動手段(アクチュエータ)の長寿命化が期待できる試料観察装置,集束イオンビーム装置を提供すること。
【解決手段】
試料を載置する真空室と、該真空室内で移動可能なプローブと、該プローブを移動させるプローブ駆動手段と、該プローブ駆動手段の負荷を軽減する負荷軽減手段と、を備え、かつ該負荷軽減手段の軽減力を前記プローブの位置の情報に基づいて変化させる制御手段を備えた試料観察装置。
(もっと読む)
マイクロマニピュレーター及びそれを用いた微小物採取方法
【課題】大掛かりな高圧電源や、電気回路、装備などを必要せず、取出しの困難な微小絶縁物を簡単な方法により容易にピックアップして次の解析などにステップアップできるマイクロマニピュレーターとそれを用いた微小絶縁物の採取方法を提供する。
【解決手段】 先端部が尖鋭又は角錐状若しくは円錐状の金属製ニードル1と、アース接地された導電材部2と、該金属製ニードル1の末端部に前記導電材部2との電気的接続をON/OFF切り替え可能な開閉接点部3とを備え、前記金属製ニードル1の先端部側以外の基部と導電材部2と開閉接点部3とが柄部6に装着固定されている。
(もっと読む)
1 - 5 / 5
[ Back to top ]