
Fターム[3C016HC00]の内容
工作機械の治具 (2,667) | 位置検出手段 (31)
Fターム[3C016HC00]の下位に属するFターム
Fターム[3C016HC00]に分類される特許
1 - 7 / 7
芯出し装置および芯出し方法
【課題】装置全体の簡素化を図ることができ、しかも、ワークに対して安定して芯出しを行うことが可能な芯出し装置および芯出し方法を提供する。
【解決手段】ハンマー手段25によるワークWへの衝撃力の付与にてワークWの芯出しを行う。ワークWを回転させるための回転テーブル1と、ワークWに与えた打撃力と、その打撃によるワーク移動量に基づいて、現在のワークWの偏芯量を修正するために次に与える打撃力を演算する制御手段81とを備える。制御手段81にて演算された打撃力でもってハンマー手段25にてワークWを打撃する。
(もっと読む)
芯出し装置および芯出し方法

【課題】装置全体の簡素化を図ることができ、しかも、ワークに対して安定して芯出しを行うことが可能な芯出し装置および芯出し方法を提供する。
【解決手段】回転テーブル1を介して回転しているワークWの偏芯量を検出する。ハンマー手段25にてワークWへ衝撃力を付与して偏芯量を修正する芯出し動作を行う。偏芯量が予め設定された収束目標値になるまで芯出し動作を繰り返す。
(もっと読む)
レンズ芯出し装置
【課題】装置の小型化、簡素化を図り、さらには、レンズの芯出しを容易にし、再現性のよい調整を可能とするレンズ芯出し装置を提供する。
【解決手段】V溝2aによって第1の方向に案内駆動される第1の移動体4を有する第1の慣性駆動装置14と、第1の移動体4の上部に形成され、第1の方向と直交する第2の方向にV溝3aによって案内駆動される第2の移動体5を有する第2の慣性移動装置15と、第2の移動体5に配置したレンズ把持手段8とを備える。
(もっと読む)
クランプ装置
【課題】検出機構を位置を移動させることなく、クランプアームの作動角度を簡便且つ効率的に所望量に調整する。
【解決手段】クランプ装置10におけるクランプ・アンクランプ状態を検出する検出機構24は、ボディ16の側面に装着されたスイッチホルダ114の内部に傾動自在に設けられた傾動プレート116と、ピストンロッド54と共に変位し、該傾動プレート116に対して略直交方向に変位するスライドロッド126とを有し、前記ピストン52の変位作用下に前記スライドロッド126が傾動プレート116を押圧して傾動させることにより、第2検出スイッチ120によって検知され、クランプ装置10がアンクランプ状態にあることが確認される。
(もっと読む)
状態確認装置
【課題】 組み付け性や増設時の作業性がよく、しかもメンテナンス性に優れた状態確認装置を提供する。
【解決手段】 一対の連通ポート8,9と、これら一対の連通ポート8,9を接続する接続通路10と、接続通路10にオリフィス13を介して連通する検出通路12と、上記オリフィス13前後の圧力差を検出する差圧検出手段Sとを備えた圧力検出ブロックAを複数設けるとともに、上記連通ポート8,9を接続してこれら複数の圧力検出ブロックAを連結し、各圧力検出ブロックAの接続通路10が連通して供給通路を構成する。
(もっと読む)
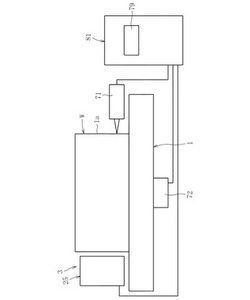
位置検出装置
【課題】移動部位のストロークリミットへの到達を検出するセンサを大幅に削減可能な位置検出装置を実現する。
【解決手段】本位置検出ユニット(位置検出装置)LSは、成形品取出機の旋回部2に設けられ、3軸加速度センサ71を搭載するセンサ部70と、マイクロコンピュータ84を有する処理部80とを備える。センサ部70では、取出ヘッド5を昇降移動させる昇降用シリンダ40や昇降アーム4を進退移動させる引抜用シリンダ30におけるストロークリミット到達の際の振動を検出し、また、旋回用シリンダ20におけるストロークリミット到達による旋回部2の傾きを検出する。処理部80では、センサ部70の検出信号に基づいて上記ストロークリミットへの到達を判断する。これにより、取出ヘッド5や昇降アーム4、旋回部2等の移動部位のストロークリミット到達を集約的に認識でき、直接的に検出していたリミットセンサを大幅に削減できる。
(もっと読む)
工作機械のワーク密着状態確認装置
【課題】加工台の着座面に付着したクーラントや切屑等の異物の清掃を行うことができ、工作機械の一時的な停止を防止し、工作機械の可動率を向上することができる工作機械のワーク密着状態確認装置を提供する。
【解決手段】ワークWの着座面13aを有する基準部材13の流体通路13bと、圧力流体供給源21との間に着座面13aの清掃用の流体を供給する清掃用流体供給回路25と、ワークWの密着状態を確認する確認用流体供給回路26を並列に接続する。両供給回路25,26に第1切換制御弁24及び第2切換制御弁31(32)を設け、確認用流体供給回路26に密着状態確認用の圧力スイッチ33(34)を設ける。制御装置からの切り換え信号により第1切換制御弁24及び第2切換制御弁31(32)を切り換え制御し、清掃用流体供給回路25から流体通路13b,13bに清掃用空気を供給して着座面13aを清掃する。
(もっと読む)
1 - 7 / 7
[ Back to top ]