
Fターム[3C033BB00]の内容
工作物の供給 (1,081) | ワークの形状 (102)
Fターム[3C033BB00]の下位に属するFターム
Fターム[3C033BB00]に分類される特許
1 - 7 / 7
搬送機能を備えた加工機械及びそれを用いた加工ライン
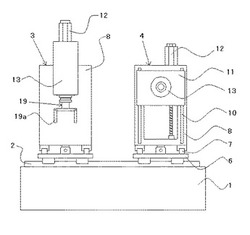
【課題】ワークの姿勢変換装置あるいは搬送装置の設置による搬送専用の装置の設置スペースを省き、工場内のスペースをより有効に利用することができる加工機械およびそれを用いた加工ラインを提供する。
【解決手段】ワークWを支持するテーブル18と、このワークWを機械加工するための加工工具17と、この加工工具17が着脱可能に把持される主軸14を備え、この主軸14が前記ワークWに対し移動を行いながらワークWに対して加工を行う加工機械において、前記主軸14に対して着脱可能なワーク把持ホルダ19を備え、このワーク把持ホルダ19でワークWを把持した状態で前記主軸14の回転力を利用してワークの姿勢変換を行う。
(もっと読む)
ワーク搬送システム

【課題】ワークの受け渡し位置の数が増大しても設備コストの増大を抑えることが可能なワーク搬送システムを提供する。
【解決手段】アルミニウム鋳造品2を搬送する搬送台車10と、搬送台車10により搬送されてきたアルミニウム鋳造品2を所定の位置に固定する固定治具30・30・・・と、を具備するワーク搬送システム1において、搬送台車10が、固定治具30・30・・・が所定の位置にアルミニウム鋳造品2を固定する動作を行うための駆動力を固定治具30・30・・・の係止ユニット32・32・32に供給するナットランナー16・16・16と、アルミニウム鋳造品2が前記所定の位置に固定されたことを検出する圧力検出器20・20・20と、を具備する。
(もっと読む)
ワーク載置装置およびこれを備えた主軸ピックアップ旋盤
【課題】 ワークピックアップ装置によりワークを正確にピックアップできるワーク載置装置を提供する。
【解決手段】ワークWを載置するワーク載置台25と、ワーク載置台傾斜許容支持手段31および弾性部材37を介してワーク載置台25を支持するベース部材30とを備える。ワーク載置台傾斜許容支持手段31は、ワークピックアップ装置が下降してワーク載置台25のワークWをピックアップする際に、ワーク載置台25のワーク載置面が水平に対して傾斜することを許容する。弾性部材37は、ワークピックアップ装置が下降してワーク載置台25のワークWをピックアップする際に、ワークピックアップ装置の下降に抗してワークWをワークピックアップ装置に押し付けると共に、ワークピックアップ装置が上昇した際にはワーク載置台25を水平に保持する。
(もっと読む)
ワークの自動加工方法およびワークの自動加工システム
【課題】 バリ取りや溶断等の作業を一層容易にできるワークの自動加工方法およびワークの自動加工システムを提供すること。
【解決手段】自動加工システム1では、ワークを第1、第2視覚センサ23,32で撮像するとともに、加工前パレット処理部52や加工ステーション処理部53によってワークの位置や輪郭を検出する。従って、検出した位置に基づいてロボット10がワークを自動的に取りに行ったり、輪郭に応じた加工パスを自動的に選定して加工指令を生成したりするので、従来のように移送や加工に先立ってワークの図形データを作成する必要がなく、従来に比して作業を一層容易にできるのである。しかも、第1原画像等に基づき、ワークの重心位置を自動的に判断してロボット10がワークを取りに行くので、ロボット10の煩わしいティーチング作業も不要である。
(もっと読む)
クランプ装置
【課題】クランプ支持ツールのクランプ位置が種々に異なる各種ワークに対応できるようにして汎用性を高めることができるクランプ装置の提供。
【解決手段】長手方向へ移動自在に設けた各スライダ4A、4B、4Cにクランプ5A、5B、5Cを設ける。各クランプ5A、5B、5Cはワーク10の各基準穴11A、11B、11Cと対応するよう位置決めする。このとき、ワーク10の3つの基準穴11A、11B、11Cを通る120°間隔の直線a,b,cの交点であるクランプ中心点O2を計算により求め、このクランプ中心点O2と、クランプ支持ツール1のツール中心点O1を一致させ、さらにスライダ4A、4B、4Cを移動させて、各クランプ5A、5B、5Cの各ツール中心点O1からの位置を、線分a,b,cの長さと一致させることにより、各クランプ5A、5B、5Cを基準穴11A、11B、11Cと一致させる。
(もっと読む)
ワーク搬送装置のフィンガー切換装置
【課題】比較的簡単で且つ占有スペースの小さな設備構成でありながら、フィンガーの切換を確実に行うことができるフィンガー切換装置を提供する。
【解決手段】搬送台車1上に4種類の起倒式のフィンガー6a〜6dを備えた複数の切換式フィンガーユニット3,3‥をピストン−シリンダ型の液圧式動力伝達器12とともに搭載する。動力伝達器12はフィンガー6a〜6dの種類別に独立していて、各フィンガー6a〜6dは対応する動力伝達器12に操作用ケーブル9を介して接続して集約する。切換操作ロボット4により動力伝達器12の操作レバー14をプッシュプル操作することで、各切換式フィンガーユニット3,3‥のフィンガー6a〜6dを一斉に選択的に切り換える。
(もっと読む)
線状部材の押出し供給方法
【課題】 簡易な構成によって、所定の長さに切断した線状部材を配設位置に向けて順次横方向に効率良く送り出すことのできる線状部材の押出し供給方法を提供する。
【解決手段】 所定の長さに切断した線状部材18を、後続する線状部材18aを用いて押し出して所定の位置に供給するための押出し供給方法であって、連続供給される線状部材18を先端からガイド部材24の平行面筒状部24aに挿入した状態で、線状部材18を切断機構34により所定の長さに切断する工程と、切断した線状部材18を、後端が平行面筒状部24aに位置するまで引出し機構40を用いて前方に引き出す工程と、後続する線状部材18aを前方に送り出し、テーパー面筒状部24bを介して平行面筒状部24aに先端を案内して挿入した後、後続する線状部材18aをさらに送り出すことにより、線状部材18を平行面筒状部24aから押し出して所定の位置に向けて供給する工程とを含む。
(もっと読む)
1 - 7 / 7
[ Back to top ]