
Fターム[3C033EE00]の内容
工作物の供給 (1,081) | 反転、傾動 (31)
Fターム[3C033EE00]の下位に属するFターム
ワークに直接作用するレバーによるもの (2)
把持部材の軸心回りに反転 (7)
反転用フレームによるもの (9)
移送と連動して反転するもの (8)
重力を利用するもの (1)
検知、制御手段 (1)
Fターム[3C033EE00]に分類される特許
1 - 3 / 3
工作機械および積み込みおよび積み下ろし方法
【課題】旋盤を簡略化すること、構造的な手間暇を減少させること、および、コンパクトな構造様式を提供する
。
【解決手段】機械フレームと、この機械フレームの垂直方向(Z軸)内において移動可能な加工材料スピンドル2と、この機械フレームの水平方向(X軸)内において移動可能な工具保持装置3と、および、加工材料8のための移送装置24加工材料スピンドル2と移送装置24との間の作業位置10内において、切削屑保護装置25が設けられており、この切削屑保護装置25が、前記加工材料スピンドル2と移送装置24との間の前記作業位置の領域10から、外へと移動され、および、この切削屑保護装置25が、移送装置24の保護のために、切削屑の落下の前に、再び、前記加工材料スピンドル2と移送装置24との間の前記作業位置の領域10に帰還移動される。
(もっと読む)
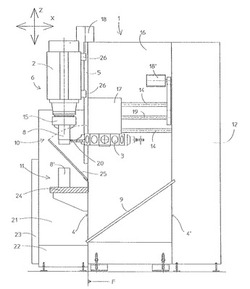
搬送機能を備えた加工機械及びそれを用いた加工ライン

【課題】ワークの姿勢変換装置あるいは搬送装置の設置による搬送専用の装置の設置スペースを省き、工場内のスペースをより有効に利用することができる加工機械およびそれを用いた加工ラインを提供する。
【解決手段】ワークWを支持するテーブル18と、このワークWを機械加工するための加工工具17と、この加工工具17が着脱可能に把持される主軸14を備え、この主軸14が前記ワークWに対し移動を行いながらワークWに対して加工を行う加工機械において、前記主軸14に対して着脱可能なワーク把持ホルダ19を備え、このワーク把持ホルダ19でワークWを把持した状態で前記主軸14の回転力を利用してワークの姿勢変換を行う。
(もっと読む)
ワークの自動加工方法およびワークの自動加工システム
【課題】 バリ取りや溶断等の作業を一層容易にできるワークの自動加工方法およびワークの自動加工システムを提供すること。
【解決手段】自動加工システム1では、ワークを第1、第2視覚センサ23,32で撮像するとともに、加工前パレット処理部52や加工ステーション処理部53によってワークの位置や輪郭を検出する。従って、検出した位置に基づいてロボット10がワークを自動的に取りに行ったり、輪郭に応じた加工パスを自動的に選定して加工指令を生成したりするので、従来のように移送や加工に先立ってワークの図形データを作成する必要がなく、従来に比して作業を一層容易にできるのである。しかも、第1原画像等に基づき、ワークの重心位置を自動的に判断してロボット10がワークを取りに行くので、ロボット10の煩わしいティーチング作業も不要である。
(もっと読む)
1 - 3 / 3
[ Back to top ]