
Fターム[3C034DD10]の内容
研削盤の構成部分、駆動、検出、制御 (11,657) | 目的 (2,044) | 非金属材料の研削 (724) | 半導体 (523)
Fターム[3C034DD10]に分類される特許
1 - 20 / 523
ウエーハの位置補正方法
【課題】 簡単な方法でチャックテーブル上に搬入されたウエーハの中心とチャックテーブルの回転中心とを容易に一致させることのできるウエーハの位置補正方法を提供することである。
【解決手段】 ウエーハの位置補正方法であって、撮像ユニットによってチャックテーブルに保持されたウエーハの外周縁の少なくとも3箇所を検出してウエーハの中心座標を算出し、ウエーハの中心座標とチャックテーブルの回転中心の座標との間の距離(ずれ量)を算出する。次いで、ウエーハの中心とチャックテーブルの回転中心を結ぶ直線がスピンドルの軸心の投影と一致するように、チャックテーブルを加工送り方向へ移動させるとともに所定角度を回転する。そして、チャックテーブルの負圧を解除してから、切削ブレードの先端をウエーハの側面に当接させた状態で切削ブレードを割り出し送り方向にずれ量分だけ移動し、ウエーハの中心とチャックテーブルの回転中心を一致させる。
(もっと読む)
研磨方法および研磨装置

【課題】基板の研磨中にシリコン層の正確な厚さを取得し、得られたシリコン層の厚さに基づいて基板の研磨終点を正確に決定することができる研磨方法を提供する。
【解決手段】本研磨方法は、基板から反射した赤外線の強度を所定の基準強度で割って相対反射率を算出し、相対反射率と赤外線の波長との関係を示す分光波形を生成し、分光波形にフーリエ変換処理を行なって、シリコン層の厚さおよび対応する周波数成分の強度を決定し、上記決定された周波数成分の強度が所定のしきい値よりも高い場合には、上記決定されたシリコン層の厚さを信頼性の高い測定値と認定し、該信頼性の高い測定値が所定の目標値に達した時点に基づいて、基板の研磨終点を決定する。
(もっと読む)
研磨終点検出方法および研磨装置
【課題】研磨対象膜の下層の金属材料の影響を排除し、渦電流センサを用いて、基板表面内の各領域での膜厚情報を取得することができ、得られた膜厚情報から基板の研磨終点を決定する方法を提供する。
【解決手段】本方法は、基板の研磨中に渦電流センサを基板の表面を横切るように移動させ、渦電流センサのインピーダンスの抵抗成分Xおよび誘導リアクタンス成分Yからなる座標X,YをX−Y座標系上にプロットし、X−Y座標系上に定義された複数のインピーダンスエリアにそれぞれ属する複数の座標X,Yを用いて、複数のインピーダンスエリアごとに複数の膜厚指標値を算出し、複数の膜厚指標値を用いて複数のインピーダンスエリアごとに基板の研磨終点を決定する。
(もっと読む)
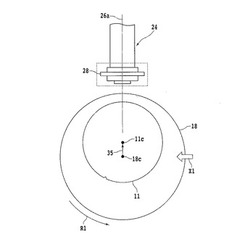
回転バランス調整用フランジ機構
【課題】高速回転する切削ブレードの振動を避けるための回転バランス調整用フランジ機構について、印をマジックなどでつける場合において生じる不具合を解消し、バランス調整の手間を簡略化するための回転バランス調整用フランジ機構を提供する。
【解決手段】固定ナットは、切削ブレードを固定フランジと協働して挟持した際、前端面となる表面からバランス取り用錘を挿入できる錘収容部を周方向に所定の間隔を置いて複数備え、表面の錘収容部の近傍には、各錘収容部の位置を示す表示部を備える。
(もっと読む)
研磨装置及び研磨方法
【目的】、過研磨を防止することが可能な研磨装置を提供する。
【構成】実施形態の研磨装置(100)は、ステージ(101)と研磨部(102,104)と検出部(110)とロック機構(120)とを備えた。ステージ(101)は、半導体基板を載置する。研磨部(102,104)は前記半導体基板の上方から前記半導体基板の周縁部を研磨する。検出部(110)は前記半導体基板の基準高さ位置を検出する。ロック機構(120)は、前記研磨部(102,104)が前記基準高さ位置から所定の距離だけ前記半導体基板面側へ移動した場合に、研磨部(102,104)の半導体基板面側への更なる移動が停止されるように、前記研磨部(102,104)の移動を拘束する。
(もっと読む)
研削装置
【課題】被加工物と接触する測定子先端部に研削屑が付着することを防止するとともに、測定子先端部が研削屑に接触することで発生する接触磨耗を低減する。
【解決手段】厚み測定器の測定子30の先端中央に形成された空間310には第1の球体33が収納され、第1の球体33の外周側には第1の球体33より小径の第2の球体34が複数配設され、第2の球体34により覆われていることで第1の球体33が回転可能なベアリング構造になっており、ベアリング構造内に第1の球体33と第2の球体34とに水が供給されて潤滑剤の役目となる水の層38を形成し異物浸入を防ぐことができる。そして、測定子先端部に研削屑が付着することを防止でき、測定子先端部が研削屑に接触することで発生する磨耗及び被加工物を傷つけることを防止できる。
(もっと読む)
加工装置
【課題】吸着保持面を有するチャックテーブルにおいて板状ワークを保持する場合に、吸着保持面が完全に覆われるように板状ワークを載置できるようにする。
【解決手段】チャックテーブル2に位置決めブロック24が固定され、位置決めブロック24には板状ワークWのオリエンテーションフラットOFと吸着保持部20に形成されたフラット部200とを平行にする角度位置決め部243と、角度位置決め部243の両端に設けられチャックテーブル2の中心と板状ワークW中心とを一致させる2つの中心位置決め部244とを備え、板状ワークWを位置決めブロック24に押し当てるだけで、板状ワークWの角度と中心位置をあわせることができ、板状ワークWを容易かつ確実に吸着保持することができる。
(もっと読む)
両面研磨方法
【課題】キャリアの厚さの経時変化に影響されず、ウェーハの平坦度を安定的に改善できる両面研磨方法を提供することを目的とする。
【解決手段】キャリアに保持されるウェーハを研磨布が貼付された上下の定盤で挟み込み、キャリアを自転及び公転させ、研磨剤を供給しながらウェーハの両面を同時に研磨するウェーハの両面研磨において、高研磨レートで研磨する第1の研磨工程と、次に低研磨レートで研磨する第2の研磨工程とを有する両面研磨方法であって、研磨後にウェーハの平坦度を測定する工程と、平坦度の測定結果に基づいて次回研磨時の第2の研磨工程の研磨条件を設定する工程とを含むことを特徴とする両面研磨方法。
(もっと読む)
研削装置及び研削方法
【課題】環状フレームや装置が損傷しにくい研削装置を提供する。
【解決手段】制御部27は、固定部21に固定された環状フレーム12の上面12aの高さ位置を検出部26に検出させ、検出された環状フレーム12の上面12aの高さ位置が吸着部23の上面23aの高さ位置よりも低い場合に駆動部25を駆動させる。
(もっと読む)
切削装置
【課題】ダイシングテープに貼着固定される被加工物の向きや位置がターゲットパターン登録時とずれていた場合にもターゲットパターンをいち早く検出することを可能とする切削装置を提供することを目的とする。
【解決手段】チャックテーブル19は、鉛直方向を回転軸として回転する回転角度がコントローラにより制御され、カセット載置部9と仮置きテーブル12との間には撮像ユニット30(撮像手段)が配設され、撮像ユニット30は被加工物上面を撮像して得られた画像情報から仮置きテーブル12上での被加工物の分割予定ラインの角度を割り出し、撮像ユニット30によって割り出された分割予定ラインの角度がチャックテーブル19の加工送り方向と平行又は直交方向になるよう、チャックテーブル19が被加工物ユニットを保持後、所定の角度回転される。
(もっと読む)
研削装置
【課題】超音波振動を伴って研削を行う研削ホイールをホイールマウントに装着する場合に高精度な電極位置精度を不要とすると共に、超音波振動加工時のノード領域の変化によっても電極接触不良を発生させず、かつ、研削ホイールを容易に着脱可能な研削装置を提供すること。
【解決手段】研削装置(1)は、ホイールマウント(31)に磁力を持つ固定電極(62)を配設すると共に、ホイールベース(413)の収容部(413a)内に磁力により引き付けられる材質で形成された可動電極713を含む可動電極部(71)を配設し、可動電極部(71)を収容部(413a)に進退可能に収容する。ホイールベース(413)にホイールマウント(31)に装着されると、固定電極(62)の磁力により可動電極部(71)が固定電極(62)に接触し環状超音波振動子(415)に通電されると共に、可動電極部(71)がホイールベース(413)に非接触とされる。
(もっと読む)
切削ブレード先端形状検出方法
【課題】 切削ブレードの先端形状を効率良く検出し、切削ブレードの交換の要否を判断可能な切削ブレード先端形状検出方法を提供することである。
【解決手段】 チャックテーブルに保持された被加工物を切削する円板状の切削ブレードの先端形状を検出する切削ブレード先端形状検出方法であって、切り込み深さを複数回変化させて被加工物を切削し、深さの異なる複数の溝を形成する溝形成ステップと、該複数の溝をそれぞれ撮像手段の直下に位置付けて該複数の溝を撮像し、各溝の溝幅を測定する溝幅測定ステップと、該複数の溝の切り込み深さ及び該溝幅測定ステップで測定した該各溝幅に基づいて、該切削ブレードの先端形状を算出する形状算出ステップと、を具備したことを特徴とする。
(もっと読む)
研磨パッド用補助板および研磨装置
【課題】化学的機械研磨に際して研磨パッド表面の温度を速やかに且つ省エネルギー効率をもって昇温して適温に維持することができる、新規な構造の研磨パッド用補助板と研磨装置を提供すること。
【解決手段】研磨パッド16を重ね合わせて固着状態で支持するパッド支持面を表面40に有していると共に、裏面42において回転定盤14に重ね合わされて着脱可能に装着される装着面を有している研磨パッド用補助板10において、通電により補助板本体38(パッド支持面40)を昇温して適温に維持する通電式温度制御手段50を設けた。
(もっと読む)
加工装置
【課題】1枚目に加工する被加工物についても1回の加工によって所望の平坦度に加工することを実現するための加工装置を提案する。
【解決手段】制御手段は、加工中のモータの最大負荷電流値と、最大負荷電流値以内で加工された被加工物の加工後の被加工面の平坦度を示す被加工面平坦度毎最大負荷電流値表を格納する格納部と、加工中のモータの負荷電流値をモニタする負荷電流値モニタ部と、所望平坦度と格納部に格納された被加工面平坦度毎最大負荷電流値表とから所望平坦度に対応する最大負荷電流値を選択する選択部と、負荷電流値モニタ部でモニタされる加工中のモータの負荷電流値が、選択部で選択された最大負荷電流値以下になるように加工送り手段の送り速度を制御する送り制御部と、を備える加工装置が提供される。
(もっと読む)
シリコンウェーハの研磨方法及び研磨装置
【課題】研磨布のドレッシング状態の変化によって生じる研磨速度の変化による研磨代のばらつきを抑制し、仕上がり厚さを高精度に制御できるシリコンウェーハの研磨方法及び研磨装置を提供する。
【解決手段】所定の研磨代となるように研磨時間を設定し、タンク内に貯蔵された研磨剤を研磨布に供給しながらシリコンウェーハを研磨布に摺接させて設定した研磨時間で研磨し、供給した研磨剤を前記タンク内に回収して循環させながらシリコンウェーハの研磨をバッチ式に繰り返すシリコンウェーハの研磨方法において、研磨布をドレッシングした後のバッチ回数の増加に伴って変化する研磨速度を予めデータベースに記録しておく工程と、所定の研磨代となるように研磨時間を設定する際に、データベースに記録された研磨布をドレッシングした後のバッチ回数の増加に伴って変化する研磨速度に基づいて研磨時間を設定する工程とを有するシリコンウェーハの研磨方法。
(もっと読む)
研削装置
【課題】研削送りを制御する機能が停止しても、研削送りの暴走を抑制できる研削装置を提供する。
【解決手段】被加工物を保持する保持手段20と、被加工物に対して粗研削を施す第一の研削手段30と、仕上げ研削を施す第二の研削手段40と、第一の研削送り手段50及び第二の研削送り手段60と、これらを制御する制御手段3とを備える研削装置1であり、第一の研削送り手段50及び第二の研削送り手段60には、サーボモータ54、64と、これらを制御するサーボドライバー55、65とを備えており、サーボドライバー55、65は、制御手段3からサーボモータ54、64の駆動開始の指令を受けた後、駆動終了の指令を受ける前に制御手段3に対して随時駆動の確認信号を出力する。そして、制御手段3から応答が途絶えた際にサーボモータ54、645の駆動を停止することで、第一の研削送り手段50及び第二の研削送り手段60の暴走を抑制できる。
(もっと読む)
加工ヘッド、加工機械及び加工方法
【課題】微細気泡を含有する液剤を被加工物の表面の加工に有効に利用することのできる加工ヘッドを提供することである。
【解決手段】回転する工作具10を被加工物Wの表面に接触させて当該被加工物Wの表面を加工する加工ヘッド100であって、前記工作具10の内部に設けられ、供給される液体を導いて被加工物Wの工作具10が接触する部位の近傍に向けて吐出する少なくとも1つの流路25を備え、前記流路25には絞り部255a〜255hが形成された構成となる。
(もっと読む)
移動体の接触検知方法
【課題】二つの物体を近づける場合に、両者間の隙間を維持したままできるだけ両者を近づけるとともに、両者が近づいたことを検出することを可能とするための、移動体の接触検知方法を提供する。
【解決手段】少なくとも一方が移動体として移動する二つの物体同士が、所定の距離まで近づいたかを検知するための移動体の接触検知方法であって、少なくとも二つの物体の間に設けたい所定の距離よりも厚い可撓性を有するベース部と、ベース部の少なくとも一部の表層部に形成される可撓性を有する光反射部と、を有する接触センサーを用いる。
(もっと読む)
研磨監視方法および研磨装置
【課題】研磨装置の稼働率を低下させることなく渦電流センサの較正を行うことができ、精度の高い膜厚監視を可能とする研磨監視方法および研磨装置を提供する。
【解決手段】回転する研磨テーブル1上の研磨面2aに研磨対象の基板Wを押圧して基板W上の導電膜mfを研磨し、研磨中に研磨テーブル1に設置された渦電流センサ50により導電膜mfの厚さを監視する研磨監視方法であって、研磨中の渦電流センサ50の出力信号を取得し、渦電流センサ50の上方に基板Wが存在しない時の出力信号を用いて渦電流センサ50の出力調整量を算出し、出力調整量を用いて渦電流センサ50の上方に基板Wが存在する時の出力信号を補正して基板W上の導電膜mfの厚さを監視する。
(もっと読む)
ワーク位置ずれ検出装置
【課題】搬送による位置ずれが発生した被加工物を研削室内に移動する前に取り除くことができ、自動運転の続行可能な機能を持つ加工装置を提供する。
【解決手段】ワーク位置ずれ検出装置3を備える加工装置1であり、搬送アーム31に位置ずれ検出手段40を備え、検出手段40は、ワーク外周部近傍のワークW上で検出光を投光する投光部41aと検出光がワークWで反射し受光する受光部41bとからなる位置ずれ検出センサー41と、受光量を数値で算出する演算部412と、算出値が予め設定したしきい値以上の時は動作を続行し、予め設定したしきい値を下回る時はワークWを取り除く指示のメッセージを画面に表示する判断部413とを備える。ワークWの位置ずれが発生してもワークWが研削室9b内に移動する前にワークWを取り除くことができ、加工装置1の自動運転も続行可能となるため、被加工物の生産性の向上を図ることができる。
(もっと読む)
1 - 20 / 523
[ Back to top ]