
Fターム[3C058BB01]の内容
仕上研磨、刃砥ぎ、特定研削機構による研削 (42,632) | 制御 (755) | 制御手段 (548)
Fターム[3C058BB01]の下位に属するFターム
Fターム[3C058BB01]に分類される特許
1 - 20 / 47
研磨方法
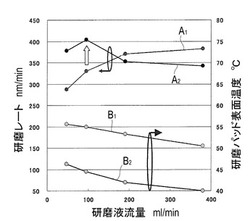
【課題】研磨レートを下げることなく、研磨液の使用量を削減できるようにする。
【解決手段】研磨パッドの表面に研磨液を供給しながら、研磨パッドの表面に基板を摺接させて該基板を研磨する研磨方法において、研磨パッドの表面温度を制御することなく基板を研磨した時の研磨液供給流量と研磨レートとの関係、及び研磨パッドの表面温度を所定温度に制御しながら基板を研磨した時の研磨液供給流量と研磨レートとの関係を予め求めておき、研磨パッドの表面温度を所定温度に制御しながら基板を研磨した時の研磨レートの方が研磨パッドの表面温度を制御することなく基板を研磨した時の研磨レートよりも高くなるように、研磨パッドの表面温度を所定温度に制御しながら、高い研磨レートが得られるように、研磨パッドの表面に研磨液を継続的に供給する。
(もっと読む)
薬液リサイクル方法および該方法に用いる装置

【課題】シリコンウェーハ表面を処理するプロセスで使用した使用済み薬液において、前記プロセスに必要な薬液中の成分を簡易に調整し、リサイクル処理後の薬液でも未使用薬液と同等のプロセス性能を得ることが可能な薬液リサイクル方法および該方法に用いる装置を提供する。
【解決手段】本発明の薬液リサイクル方法は、シリコンウェーハ402表面を処理するプロセスで使用する薬液のリサイクル方法であって、前記プロセスで使用した後の使用済み薬液を限外ろ過フィルター1で限外ろ過して、ろ過後薬液を得る工程と、吸光光度計3により該ろ過後薬液の吸光度または透過率を測定して、前記ろ過後薬液に含まれる成分の濃度を求める工程と、求められた前記濃度の情報に基づき、前記ろ過後薬液の成分濃度を調整して調整後薬液を得る工程と、該調整後薬液を前記プロセスで使用する工程と、を有することを特徴とする。
(もっと読む)
フィレットローリング加工装置及びフィレットローリング装置の異常判定方法
【課題】フィレットローリング加工時に発生するフィレットローラに欠けなどの異常を精度よく判定可能なフィレットローリング加工装置及びフィレットローリング装置の異常判定方法を提供する。
【解決手段】フィレットローリング加工装置(100)は、フィレット溝部Fにフィレットローラ(5)を圧接しながら、クランクシャフトSを回転することによりフィレットローリング加工を行う。フィレットローリング加工後、低圧力値でフィレットローラ(5)をフィレット溝部Fに圧接しながら、低回転速度でクランクシャフトSを回転駆動して検出した振動振幅にフィレットローラ(5)における異常の有無を判定する判定手段(15)を備える。
(もっと読む)
工作機械
【課題】回転工具の加工部が摩耗しても、この回転工具の加工部の拡縮を無人で行える構造を実現する。
【解決手段】
制御器19を構成する測定制御手段28により孔の加工精度を測定し、この測定値に基づき前記回転工具の加工部の拡縮の要否を、拡縮要否判定手段29により判定し、拡縮が必要と判定した場合に、拡縮制御手段30により自動的に前記回転工具の加工部を拡縮する。
(もっと読む)
円盤状基板の製造方法および純水供給装置
【課題】円盤状基板の研磨を行なう研磨装置の洗浄を行なう場合でも、研磨装置に温度変化が生じにくく、研磨に要求される精度を維持しやすい円盤状基板の製造方法等を提供する。
【解決手段】ガラス基板を研削する研削工程と、研削工程を経たガラス基板の主表面を研磨機50により研磨剤を用いて研磨するとともに研磨に際して温度管理された処理水を用いる研磨工程と、研磨工程に用いられる処理水の温度管理と同様に温度管理された洗浄水を用いて研磨機50を洗浄する工程と、を有することを特徴とする円盤状基板の製造方法。
(もっと読む)
加工ロボットとその加工制御方法
【課題】 工具をワークに押付けながらワークを加工することができ、かつ砥石の使用効率を大幅に高めることができる加工ロボットとその加工制御方法を提供する。
【解決手段】 工具12と、工具を3次元空間内で位置と姿勢を移動可能なロボットアーム16と、加工データを記憶しロボットアームを制御するロボット制御装置20とを備える。加工データに基づく加工軌道3に沿って工具12を移動し、工具をワーク1に押付けながらワークを加工し、かつ加工中に空間6自由度(並進3自由度+回転3自由度)のうち、工具の押付け方向6の並進を除いた5自由度の空間上で、ワークと工具12との接触面に沿って工具12を往復動させる。
(もっと読む)
ガラス板の研磨状況をモニタリングする装置及び方法
【課題】ガラス板の研磨工程において研磨状況を正確且つ迅速にモニタリングすることができる装置及び方法を提供する。
【解決手段】ガラス板研磨状況のモニタリング装置は、ガラス板で研磨装置10により研磨される部分の位置を測定する位置測定部110;研磨装置10に流入する電流を測定する電流測定部120;研磨装置10に流入する電流に対する参照値をガラス板の研磨位置ごとに貯蔵するメモリ部130;及び位置測定部110及び電流測定部120による研磨位置ごとの電流測定値とメモリ部130に貯蔵された研磨位置ごとの電流参照値とを比較して研磨状況の不良可否を判断する制御部140;を含む。
(もっと読む)
データ処理装置、研磨装置、研磨レートの推定方法およびプログラム
【課題】 研磨レートの推定精度を高める。
【解決手段】 研磨中における研磨部分の温度を検出すると共に、温度以外の、研磨レートと関係のある所定の物理量を検出する(ステップS1)。そして、その検出した温度の時間的な変化傾向に基づき研磨期間中における少なくとも2つの異なる時間範囲を設定する(ステップS2)。それら各時間範囲毎の研磨部分温度情報と、前記温度以外の物理量の情報とを利用して、研磨レートを推定する(ステップS3)。
(もっと読む)
研磨装置および研磨方法
【課題】被処理物の破損を防止または抑制し、かつ被処理物を高精度に研磨することのできる研磨装置および研磨方法を提供すること。
【解決手段】上定盤と、下定盤と、上定盤および下定盤の間に、ワークを保持するキャリアとを有し、キャリアに保持されたワークが上定盤および下定盤により挟み込まれることでワークに圧力が加わった状態にて、キャリアが上定盤および下定盤に対して相対的に自転しながら公転することにより、ワークの両面を研磨するよう構成された研磨装置であって、ワークの研磨時における研磨抵抗を測定する研磨抵抗測定手段220と、研磨抵抗測定手段220により測定された研磨抵抗に基づいて、キャリアの自転比率を制御する制御手段230とを有する。
(もっと読む)
スラブの表面を研磨するためにスラブを取り扱う方法および装置
本発明は、スラブ(2a,2b)の表面を、圧延ロール域における圧延加工前に研磨し、その際、スラブを、可逆の研磨台(12a,12b)上に載設させて、研磨室に配置された、研磨機ユニット(I,II)の研磨アセンブリの下側で往復運動させ、表面を研磨加工したあとで直線的に研磨台を研磨室から外方へ移動させ、スラブを、研磨台から持ち上げて反転装置に供給し、その際、スラブを、反転後に反転装置から取り出して、未加工の別の表面が上側に位置するように研磨台に収容し、次いで、該研磨台を、表面を加工するために新たに研磨室に進入させる、特に連続鋳造により製造されたスラブを取り扱う方法および装置に関する。構造上の手間が大きく低減された、極めて簡単な、連続鋳造されたスラブを研磨する際にスラブを取り扱う方法および装置を提供することが望ましい。このことは、スラブを、回動可能なスラブ挟持兼持上手段(14;14a,14b)を備えたスラブマニピュレータ(9)により受け取り、スラブマニピュレータにより、緊締されたスラブを横方向に搬送することも反転することもできるようにすることにより達成される。  (もっと読む)
(もっと読む)
内面研削工具
【課題】 複数の加工部位の内面研削を行う際、同時に加工して加工効率の向上を図ると同時に、すべての加工部位の加工精度が保証できる工具を提供する。
【解決手段】 複数の加工ユニット3を同軸上に備えた内面研削工具1において、工具1の軸中心に、回転自在なコントロールシャフト5を配設し、このコントロールシャフト5の近傍に、ネジ状減速機構15を一列に並べて設けるとともに、各ネジ状減速機構15とコントロールシャフト5とが、それぞれの電磁クラッチ14によって離接自在になるようにし、制御ユニット7の制御によって、電磁クラッチ14をオンにすることで、コントロールシャフト5の回転がネジ状減速機構15に伝達されるようにし、それぞれの拡縮機構19によって各加工ユニット3の刃具17が拡縮するようにする。
(もっと読む)
CMPスラリーを注入する方法
【課題】流量を制御するデバイスを調整する手段とフィードバックループでさらに組み合わせることで、スラリーリザーバの異なる部分内のスラリー濃度を調整してパッド上のスラリー分布を改善する。
【解決手段】インジェクタ10は、凹状の後縁12を有し、底面が研磨パッドに面し、軽荷重下で該パッドに載り、スラリーが、インジェクタ10の上部にある1つ又は複数の開口を通して導入されてチャネル22又はリザーバを通って底部まで進み、複数の開口から出て薄膜状に広がり、ウェハ14と研磨パッドとの間に導入されるのに十分なほど少ない量でウェハ14の前縁に沿って研磨パッドの表面とウェハ14との境目に導入される。流体を導入するための複数の入口20を利用し、該入口20に流体の流量制御手段19を装着し、ウェハ14の表面へのスラリー送出を調整してウェハ14の表面における除去率の均一性を改善するように流量制御手段19の調整を行う、方法。
(もっと読む)
研磨装置の押圧力検出装置
【課題】研磨加工部に作用する押圧力を正確に検出可能な押圧力検出装置を提供する。
【解決手段】研磨ヘッドの駆動軸30は、支持フレーム部23に回転自在かつ回転軸方向に移動自在に支持され、ヘッド回転機構40及びヘッド昇降機構50により駆動される。この駆動軸30と研磨ヘッド70とは、カップリング部60により回転軸方向にのみ弾性的に相対変位可能に接続されるとともに、カップリング部60には駆動軸30と研磨ヘッド70との相対変位を非接触で検出する相対変位検出部110が設けられる。演算処理装置120は、検出された相対変位量およびカップリング部60の弾性係数に基づいて研磨荷重を算出する。
(もっと読む)
電動工具
【課題】手持ち式のディスクグラインダやマルノコであって、電動モータを起動状態にロックするロックオン機構を備えた電動工具において、従来誤って落下させた場合に床面に衝突した際の衝撃を検知することにより電動モータを停止させていたので、床面の傷つき等が発生する場合があった。本発明では、ロックオン状態のまま落下させた場合に床面等の傷つきがより少なくなるようにする。
【解決手段】自由落下中の加速度gを加速度センサ20により検知して、電動モータ5を停止させることにより、砥石等の先端刃具が停止した状態で床面等に衝突するようにする。
(もっと読む)
終点検出装置および研磨装置
【課題】研磨加工中に高精度に研磨終点を判定することができる終点検出装置を提供する。
【解決手段】終点検出装置は、所定の条件により算出される予測研磨時間の前後に一定の時間幅を有して定まる許容時間が設定される初期条件設定部62と、予め第1のウェハを研磨加工することでEPD部40により検出された複数の分光の波長域から少なくとも2以上の分光の波長域の組み合わせを複数選択して、2以上の波長域の分光の各光強度信号を合成して合成信号をそれぞれ算出し、複数の2以上の波長域の組み合わせの中から許容時間に生じる合成信号の出力値が予め定められた所定の条件に一致するような特徴点を表す特定の2以上の波長域の組み合わせを決定する検出条件決定部64と、第1のウェハの研磨加工よりも後に行われた他のウェハの研磨加工中に、EPD部40により検出される特定の2以上の波長域の分光に基づいて得られる合成信号が上記特徴点を表した時点で研磨終点を検出し研磨加工の終了を判断する終点判定部65とを備えて構成される。
(もっと読む)
研磨方法および研磨装置
【課題】研磨の終点を容易かつ高い精度で検出する。
【解決手段】基板W表面の被研磨部分と研磨パッド20を面接触させ、基板Wと研磨パッド20の間に研磨スラリー25を供給して、接触面に沿って基板Wと研磨パッド20を相対的に移動させることにより、被研磨部分を研磨するに際し、研磨中に測定される、接触面におけるせん断力SF、押圧力DFおよび摩擦係数COPのいずれかに基いて、被研磨部分の研磨の終点を検出する。基板Wと研磨パッド20の相対的な移動は、基板Wの回転によって行われ、せん断力SF、垂直抗力DFおよび摩擦係数COFのいずれかの経時的変化をフーリエ変換した結果において、基板Wの回転数に相当する周波数での強度に基いて、被研磨部分の研磨の終点を検出することができる。
(もっと読む)
SiC単結晶基板の研磨方法
【課題】CMP工程中に加工変質層の有無を把握でき、CMP工程の継続か終了を容易に判断できるSiC単結晶基板の研磨方法を提供する
【解決手段】第1の不純物濃度を持つ第1の領域と前記第1の不純物濃度よりも大きい第2の不純物濃度を持つ第2の領域とを持つSiC単結晶から成るモニター基板と前記第1の不純物濃度と同一の不純物濃度を持つSiC単結晶基板とを共に機械研磨加工する機械研磨工程と、前記機械研磨工程を経た前記モニター基板と前記SiC単結晶基板とを共にCMP加工するCMP工程と、前記CMP工程を経た前記モニター基板の前記第1の領域と前記第2の領域との段差を測定する段差測定工程と、前記測定された段差が所定の範囲で有れば研磨終了と判断する研磨終了判定工程と、からなるSiC単結晶基板の研磨方法。
(もっと読む)
スラリー供給装置
【課題】研磨装置において、従来は、研磨用流体中の微生物の存在の有無、微生物の繁殖傾向、および微生物汚染防止手段の駆動による実際の効果を、常に迅速に把握、確認することができないため、研磨装置でのウエハの安定した研磨に課題があり、常に安定した研磨を維持することができるスラリー供給装置を提供することを目的とする。
【解決手段】研磨原液の供給ライン7から前記複数の研磨原液の混合液であるスラリーの研磨装置34、37への供給ライン32、35に至るいずれかの部位に、微生物を検出する微生物検出手段200を備えたことを特徴とするものである。
(もっと読む)
研磨終点検出方法
【課題】所定の膜を所望の膜厚を研磨終点として該研磨終点を初期膜厚の差によらず、またスラリー等の影響を受けることなく安定して且つ、精度よく検出する研磨終点検出方法を提供することを目的とする。
【解決手段】本発明は上記目的を達成するために、所定の膜からの反射光を各波長ごとに分光する第1のステップと、反射光を各波長ごとの反射率に換算する第2のステップと、各基準波長幅における反射率の変化量をそれぞれ算出する第3のステップと、各反射率の変化量を評価波長範囲にわたって平均し一定波長域ごとの反射率変化度合いの平均値を求める第4のステップと、研磨の進行に伴って一定波長域ごとの反射率変化度合いの平均値波形に生じる特徴的な変化P、Qを基に研磨終点を検出する第5のステップとを有する研磨終点検出方法を提供するものである。
(もっと読む)
ワイヤソー
【課題】カーフロスを低減しつつ所望の起伏をウエハ表面に良好に残す。
【解決手段】複数のガイドローラ26A等に巻回された切断用ワイヤにより形成され、ワイヤ軸方向に駆動されるワイヤ群と、ワイヤ群のワイヤ並び方向と直交する切込み方向にワークを移動させるワーク保持部材とを備えたワイヤソー。ワイヤソーは、さらにワイヤ群とワークとをワイヤ並び方向に相対的に移動させる移動手段と、その移動方向を切り替え制御するNC装置80とを備えている。移動手段は、ガイドローラ26A等を外周上に支持し、かつ制御水循環用の内部通路を備えるローラ支持軸40と、前記内部通路に制御水を循環させる温調器76等を備えた循環系統とを有し、NC装置80は、温調器76を制御することによりローラ支持軸40に供給する制御水の温度を一定周期で切り替える。
(もっと読む)
1 - 20 / 47
[ Back to top ]