
Fターム[3C269AB00]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914)
Fターム[3C269AB00]の下位に属するFターム
機械加工 (1,369)
レーザー加工 (96)
溶接、溶断 (136)
塗装 (34)
電気電子製品製造 (51)
縫製作業、ミシン (1)
製図、CAD、プロッタ、グラフィック (22)
ハンドリング作業 (150)
医療、福祉 (2)
検査、点検、測定、試験 (100)
その他の作業 (83)
複合加工機械、マシニングセンタ (186)
産業用ロボット、マニピュレータ (633)
作業種類に限定されない特殊な製品 (49)
Fターム[3C269AB00]に分類される特許
1 - 2 / 2
機械可動部の加減速制御方法
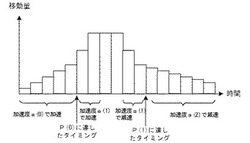
【課題】1つの移動指令での移動中において、モータの位置に応じて加速度を変更して加減速制御できる加減速制御方法を得る。
【解決手段】移動指令による目標位置までの移動中のモータの位置(0〜P(0)、P(0)〜P(1)、P(1)以上)に対応する加速度(a(0)、a(1)、a(2))を加速度パターンとして予め制御装置に設定しておく。モータ駆動中、前記加速度パターンに基づいて、モータの位置に応じて加速度を変更し加減速制御して速度を制御する。
(もっと読む)
壁面用部品の板取り装置と壁面用部品の板取りプログラムと記録媒体とプレカット装置

【課題】建物の対象壁面に、板状の複数の部品を隙間無く配列するとき、歩留まりを良くし、かつ、施工費も抑制する。
【解決手段】 該当する対象壁面を分割線で複数の領域に分割する。そのいずれかの分割線を無効にし、もしくは、いずれかの前記領域をさらに分割して、全ての領域を原板から切り出すことができる形状にする。一枚の原板から切り出すことができる部品または部品の組を選択して、各原板上に選択した部品を板取りする。(施工コストK=原板数M×原板の単価+部品数N×施工単価)とする演算処理を実行する。分割線の位置と板取りの組み合わせを変更して、施工コストKが最小値を示すときの部品の形状と最適板取りを求める。その最適板取りに基づいて、全ての部品をプレカットするためのプレカットデータを生成する。
(もっと読む)
1 - 2 / 2
[ Back to top ]