
Fターム[3D232CC01]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043)
Fターム[3D232CC01]の下位に属するFターム
操舵安定性 (988)
操舵感覚 (1,268)
操舵応答性、旋回性 (405)
ヨー特性の向上 (70)
横加速度特性の向上 (17)
ステア特性の改善 (350)
ITSの利用 (18)
自動走行への対応(車庫入れ機能を含む) (800)
Fターム[3D232CC01]に分類される特許
1 - 20 / 127
電動機の制御装置
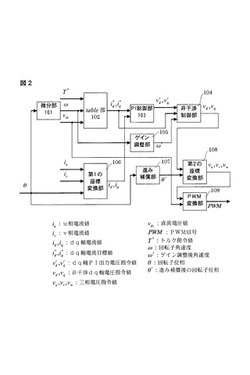
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
電動パワーステアリング装置の制御装置

【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
操舵制御装置
【課題】小型かつ軽量で構成部材の破損を防止可能な操舵制御装置を提供する。
【解決手段】ECU40は、トルクセンサ31により検出した操舵トルクに基づき基準補助トルクを算出する。ECU40は、算出した基準補助トルクをラック6の位置に基づき補正することで補正補助トルクを算出する。具体的には、ECU40は、ラック6が移動可能範囲の一端近傍の所定の第1位置から前記一端側へ移動するに従い、または、ラック6が移動可能範囲の他端近傍の所定の第2位置から前記他端側へ移動するに従い前記基準補助トルクの値がより小さくなるよう補正することで補正補助トルクを算出する。ECU40は、ラック6の位置に基づき前記基準補助トルクまたは前記補正補助トルクのいずれかを補助トルクとして決定する。ECU40は、決定した補助トルクに基づきアクチュエータ52の駆動を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】ラックシャフトがストッパに衝突したときに発生するステアリングシャフトの慣性トルクを小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置1は、ステアリングシャフト10と、ラックシャフト20と、ストッパ41と、ステアリングシャフト10にトルクを付与する電動モータ51と、電動モータ51の駆動電流を制御するための指令信号を出力する制御装置54とを備える。制御装置54は、ラックシャフト20がストッパ41に衝突したときにステアリングシャフト10に発生するトルクを慣性トルクとし、慣性トルクとは反対の方向のトルクを補償トルクとし、ステアリングシャフト10に補償トルクを付与する電動モータ51の駆動電流を補償電流とし、補償電流を電動モータ51に供給するための指令信号を補償指令信号として、慣性トルクが発生しているときに補償指令信号を出力する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】トルク変動の発生を抑えつつ、加算角に含まれるモータ回転角速度の推定誤差を補正して、安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】加算角調整演算部は、トルク偏差Δτに基づき第1変化成分が演算される方向に応じて、推定モータ回転角速度(ωm_e)に対応する第1の閾値dθlim1、及び当該第1の閾値dθlim1よりも推定モータ回転角速度(ωm_e)から離れた値を有した第2の閾値dθlim2を設定する。そして、これら二つの閾値(dθlim1,dθlim2)により規定される制限範囲内に加算角θaを制限する。更に、加算角調整演算部は、制御角と実回転角との乖離を示す負荷角を推定する。そして、その負荷角が安定領域外にある場合には、上記第1の閾値dθlim1を、推定モータ回転角速度(ωm_e)から、その想定される推定誤差の最大値に対応する所定値N2離れた値に変更する。
(もっと読む)
電動パワーステアリング装置
【課題】システムを大型化することなく、すえ切り時において操舵補助力が不足しないコンパクトな構造の電動パワーステアリング装置を提供する。
【解決手段】操舵系に連結され、前記操舵系に減速機を介して操舵補助トルクを発生するモータ18を備え、操舵系の操舵トルクや車速に基づき前記モータを制御し、操舵アシストトルクを発生する電動パワーステアリング装置において、前記減速機を減速比の異なる第1減速機18b、20と第2変速機18c、21で構成し、この第1、第2減速機18b、20、18c、21を切替える切替手段13を備えた。
(もっと読む)
作業車両
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
操舵反力制御装置
【課題】運転者の状態に応じたより適切な補助反力をステアリングに付与可能とする操舵反力制御装置を提供する。
【解決手段】操舵反力制御は、運転者の疲労状態及びステアリングホイールの把持位置などの運転者の把持姿勢に応じて、ステアリングに付加する補助トルクを補正する。補助トルクは、例えば操舵トルクや操舵フリクションである。例えば反力装置コントローラ6は、検出する運転者の把持位置がステアリングホイール7の中心に対して上側に位置していると判定しているときに、運転者が疲労状態になったと推定すると、疲労状態でないと推定した場合に比べて、補助トルクを増大補正する。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
狭路走行支援装置、狭路走行支援方法
【課題】狭路を走行する際に、運転者に対して適切なステアリング操作を直感的に促す。
【解決手段】ソナー11L及び11Rによって、走路境界との距離yL及びyRを検出し、検出結果に応じて狭路支援制御の介入が必要か否かを判断する(S103)。制御介入が必要であると判断したら、最終トルク指令値Ifに対して制御介入し、操舵支援を行う(S105)。ここでは、回避トルク指令値Iaと助勢トルク指令値Isとの加算によって最終トルク指令値Ifを演算する(S205)。回避トルク指令値Iaは、走路境界から離れる方向の支援トルクとなる。一方、助勢トルク指令値Isは、運転者の操舵方向と同一の支援トルクとなるので、運転者の操舵方向が走路境界に向かっていれば、この助勢トルク指令値Isを減少補正することで、走路境界に対する接近が抑制される。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
ステアリングシステムおよびステアリング装置用回転伝達機構動作位置ズレ認定方法
【課題】 ステアリングホイールの操作によって回転する操作側シャフト60の回転を、転舵側シャフト18に伝達し、その回転伝達における回転伝達比が自身の動作位置の基準動作位置からの変化量に応じて規定された値となるように変動する回転伝達機構140を有するステアリング装置において、回転伝達機構の基準動作位置が正規の位置からズレている際に、そのズレに対処する。
【解決手段】 左右の旋回操作の各々において、転舵側シャフトの回転量が設定量となったときの操作側シャフトの回転量を検出し、それらを比較して、回転伝達機構の基準動作位置のズレの量を認定する。その認定されたズレの量に基づいて回転伝達比を認定し、その認定された回転伝達比に基づくことによって、ステアリングホイールの操作力を適切に推定し、その適切な操作力に基づいて、助勢装置82による助勢力を制御する。
(もっと読む)
操舵装置
【課題】 車両と他の物体との接触やエアバッグの展開などのステアリングに対して外力が作用する場合に、ドライバが操作するステアリングの操作性を向上させることができる操舵装置を提供する。
【解決手段】 操舵ECU30は、車両Mと車両Mの周囲における障害物との接触の可能性を算出し、さらに接触回避可能性を算出する。ここで接触回避可能性が所定のしきい値を超える場合に、ステアリングホイール12における押し引き方向DS1および揺動方向DS2などの副操作方向への動作を規制する。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より車両後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムの実用性を向上させる。
【解決手段】前輪12Fの車体10に対する平面視における位置を変更する前輪位置変更装置84Fを備え、その前輪位置変更装置84Fを制御するために制御装置が有する制御部を、車両の旋回時において、前輪12Fを、車両が直進する際の位置である直進時前輪位置から旋回外側に移動させるように構成する。本車両運動制御システムによれば、車両の旋回時に、前輪12Fの車体10に対する位置を旋回外側に変更することで、車両の斜め前方への転倒を防止することが可能となる。
(もっと読む)
1 - 20 / 127
[ Back to top ]