
Fターム[3D232CC43]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661) | オーバーシュート、アンダーシュートの防止 (27)
Fターム[3D232CC43]に分類される特許
1 - 20 / 27
操舵制御装置
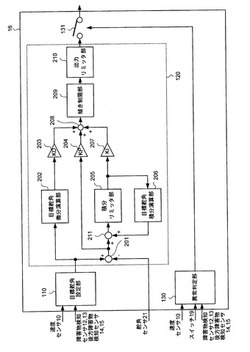
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部(16)は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部(110)と、操舵輪(W)の実舵角を検出する実舵角検出部(21)と、目標舵角設定部(110)によって設定された目標舵角と、実舵角検出部によって検出された実舵角との偏差に基づいて算出される操舵部(2)の動作量を制御する操舵制御値を操舵部(2)に出力する操舵制御値演算部(120)と、操舵制御値演算部(120)によって算出される所定時間当たりの操舵制御値の変化を制限する傾き制限部(209)と、を備える。
(もっと読む)
車両用操舵装置

【課題】車両が砂利道等を走行している場合に、転舵輪の振動が操舵部材に伝達されるのを抑制できる車両用操舵装置を提供する。
【解決手段】伝達比可変装置7は、第1シャフト11および第2シャフト12を差動回転可能に連結する差動機構13と、差動機構13を駆動する伝達比変更用モータ14とを有している。伝達比変更用モータ14は、実act角演算部76によって演算された実act角θactが目標act角演算部71によって演算された目標act角θact*に等しくなるようにフィードバック制御される。外乱判定部77によって第2シャフト12に外乱が入力されていると判定されたときには、伝達比変更用モータ14のフィードバック制御に用いられる比例ゲインKPが通常よりも低減される。
(もっと読む)
電動ステアリング装置
【課題】運転者にとって期待される安定した修正操舵の実施を可能とする電動ステアリング装置を提供する。
【解決手段】操舵トルクTに基づいて制御装置200Aにより制御されて操舵補助力を発生する電動機を11備えた電動パワーステアリング装置において、操向ハンドルに設けられて、運転者の操作により電気信号を出力する操作スイッチ2aL,2aRと、操作スイッチ2aL,2aRからの電気信号に応じて電動機11を駆動する電流を付加する付加電流値波形を演算して出力する付加電流演算部300Aと、を備えている。付加電流演算部300Aは、中立位置近傍の所定の操舵角の範囲において操作スイッチ2aL,2aRが操作されたことを検出したとき、修正操舵のための第1電流と、その修正操舵に対する戻し操舵のための第2電流を、車両の走行状態に応じて生成し、付加電流値IAdとして出力する。
(もっと読む)
ステアバイワイヤ式のステアリング装置
【課題】減速旋回中において、減速旋回中に車両に作用する遠心力が一定になるように操舵輪の操舵角の制御を行う。
【解決手段】ステアバイワイヤ式のステアリング装置は、ハンドル20の旋回角φを検出する旋回角検出センサ32と、操舵輪30の操舵角θを検出する操舵角センサ32と、操舵輪30を駆動する操舵駆動装置3と、操舵駆動装置3を制御する制御装置4とを備え、ハンドル20の旋回に応じて操舵輪30を操舵方向に駆動する。ステアリング装置は、車両の速度Vが旋回角φに応じて設定された制限速度より大きいときに、車両の速度Vを制限速度まで減速する減速手段を備える。そして、この減速手段により減速旋回しているときに、車両に作用する遠心力が一定となるように操舵角θをハンドル20の旋回角φに応じた所定角度まで大きくする。
(もっと読む)
車両運動制御装置
【課題】横転限界舵角をより正確に演算し、車両状態に応じた操舵制御が行えるようにする。
【解決手段】車両重量Mや重心高Hおよび車速Vに基づいて随時に横転限界舵角Strlimを演算する。これにより、車両状態に応じた正確な横転限界舵角Strlimを演算することが可能となる。また、横転限界舵角Strlimに対応する舵角反力特性を求めておき、ドライバがステアリング操作して舵角Strが発生したときに、その舵角Strに対応する舵角反力を発生させることで、より早くから横転限界舵角Strlimに至らないように舵角Strを抑制する。横転が発生する直前の舵角Strである横転限界舵角Strlimを車両重量Mや重心高Hおよび車速Vに応じた値として演算しているため、車両状態に応じた操舵制御を行うことが可能になる。
(もっと読む)
操舵制御装置及びその方法
【課題】互いに干渉しない独立した二つの操舵機構を有する操舵制御装置において、転舵輪の転舵応答性を高くする。
【解決手段】操舵制御装置は、転舵輪11L,11Rの目標転舵角を算出する反力モータECU50と、転舵輪11L,11Rの実転舵角を検出する操舵角センサ3と、目標転舵角と実転舵角との差分を基に、駆動電流値を算出する転舵指令電流演算部と、駆動電流値を、第1及び第2転舵モータ32,43それぞれを駆動する第1及び第2モータ駆動電流値に配分する転舵電流配分演算部と、第1モータ駆動電流値を基に第1転舵モータ32を駆動制御すると共に、第2モータ駆動電流値を基に第2転舵モータ43を駆動制御する第1及び第2転舵モータECU60,70と、目標転舵角と実転舵角との差分を基に、第1モータ駆動電流値を増加補正する応答遅れ補償電流演算部及び加算器とを備える。
(もっと読む)
旋回挙動制御装置、旋回挙動制御方法
【課題】旋回性能の低下を防ぎつつ旋回挙動の安定化を図る。
【解決手段】差分E1を算出し(ステップS1)、差分E1が第一の所定値th1を超えたら(ステップS3の判定が“Yes”)、その時点の推定値γeを目標値γ*として設定する(ステップS4)。そして、差分E2を算出し(ステップS6)、この差分E2が第二の所定値th2より大きいときに(ステップS7の判定が“Yes”)、差分E2に応じて転舵角θwの修正量Δθを算出し(ステップS8)、修正量Δθに応じてカウンターステアを行う。その後、再び差分E2が第二の所定値th2より小さくなり、且つ差分E1が第一の所定値th1より小さくなったら(ステップS10の判定が“Yes”)、修正量Δθの算出及びカウンターステアを終了する。
(もっと読む)
電動パワーステアリング装置
【課題】ラック&ピニオンギアに過負荷を作用させることなく、ラックエンド付近でアシストを制限する電動パワーステアリング装置を提供することを目的とする。
【解決手段】操向ハンドル3からの入力により生じる操舵トルクに応じて、電動機4が補助トルクを発生し、補助トルクを前輪1L,1Rのステアリング系に伝達する電動パワーステアリング装置100Aにおいて、操舵トルクを検出するトルクセンサ110と前輪のステアリング系に補助トルクを伝達する補助トルク伝達機構との間に、操向ハンドル3の左右への回転操作量を規制する回転終端機構6Aを設け、転舵角がラックエンド角になっているときに、それ以上の操向ハンドルの切り増し操作をしても、ピニオン軸の回転を阻止することを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】速やかにステアリング中立位置を学習して早期に絶対舵角に基づく補償制御を開始しつつ、高い中点精度の確保を可能とし、併せてその学習途上における不具合の発生を有効に防止することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン21は、ステアリング中立位置の学習機能を有する。そして、その操舵角演算の基礎となる中点情報θ0の更新毎に、その学習条件を厳格化するとともに、当該学習条件の厳格化に応じて、絶対舵角としての操舵角θsに基づく補償成分であるステアリング戻し制御量Isb*を徐々に増大させる。
(もっと読む)
車両用操舵装置及び車両用操舵方法
【課題】周囲のリスクに対応した操舵反力を運転者が理解し易い車両用操舵装置を提供する。
【解決手段】運転者が受けるステアリングホイールからの操舵反力と車両操作機器の動作状態に基づいて車両操作機器に作用する運転者の操作力以外の外乱を補償しつつ、自車両周囲のリスク度合い及び操舵角に応じた操舵反力を操舵伝達系に付加する。
(もっと読む)
電動パワーステアリング装置
【課題】保舵状態から手放し状態への移行時における操舵速度フィードバック制御のオーバーシュートを抑えて、その追従性の向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】ステアリング戻し制御部28は、操舵速度目標値ωs*に実際の操舵速度ωsを追従させるべく操舵速度フィードバック制御を実行することにより、ステアリングを中立位置に復帰させるための補償成分としてステアリング戻し制御量Isb*を演算する。また、ステアリング戻し制御部28は、そのステアリング操作の状態を判定する機能を有する。そして、当該ステアリング操作の状態が上記保舵状態から手放し状態への移行時であると判定される場合には、その出力するステアリング戻し制御量Isb*を低減する。
(もっと読む)
車両用操舵装置
【課題】ドライバの操舵遅れを効果的に補償するとともに舵角のオーバーシュートを防止した車両用操舵装置を提供する。
【解決手段】車両用操舵装置1を、ドライバが操舵操作を入力する操舵入力部30と、操舵入力部の操作量を検出する操作量検出手段91と、操舵入力部の操作量の履歴に基づいて予測操作量を演算する予測操作量演算手段90と、操作量検出手段が検出した操舵入力部の実際の操作量と、予測操作量演算手段が演算した前記予測操作量との比較結果に基づいて、操舵入力部の操作量に応じた基礎舵角に付加される付加舵角を演算する付加舵角演算手段90と、基礎舵角及び前記付加舵角に応じて前輪を操向する操舵機構部50、80とを備える構成とする。
(もっと読む)
車両用操舵装置
【課題】ドライバの操舵遅れを効果的に補償するとともに舵角のオーバーシュートを防止した車両用操舵装置を提供する。
【解決手段】ドライバが操舵操作を入力する操舵入力部30と、操舵入力部の操作量の微分値を検出する微分値演算手段90,91と、操舵入力部の操作量に応じた基礎舵角に付加される付加舵角を微分値に応じて演算する付加舵角演算手段91と、基礎舵角及び付加舵角に応じて前輪を操向する操舵機構部50,80とを備える車両用操舵装置1を、付加舵角演算手段は、微分値にハイパスフィルタ処理を施した値に所定のゲインを乗じて付加舵角を演算する構成とする。
(もっと読む)
車両用制御装置
【課題】駆動力または制動力の配分によって車両の走行安定性を高める車両用制御装置において、走行安定性を高める制御が阻害されないようにする。
【解決手段】マイコン10に含まれる目標前輪横力設定部12は、舵角θと車速Vと前輪荷重Ffzとに基づき目標前輪横力Fftを決定し、これに車両の実前輪横力Ffyが一致するようFB制御演算部16は指令値Dcを算出し配分装置駆動回路20に与える。これにより生じる後輪前後力Frxは後輪前後力センサ6により検出され、抑制量演算部38はこの値に基づき抑制量Asを算出し、減算器34は目標転舵角Atからこれを差し引く。転舵比演算部36はこれを転舵比に変換して転舵比可変装置駆動回路40に与える。このことにより車両の転舵が抑制されるので、上記配分により前輪が横滑りしやすくなることがなく、走行安定性を高める制御などが阻害されない。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を導入して応答性および追従性を向上できるとともに、制御動作も安定なモータ制御装置を提供する。
【解決手段】このモータ制御装置は、PI演算値Vdo,Vqoを演算するためのPI演算部51a,52aと、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部51b,52bと、PI演算値Vdo,Vqoと非干渉化制御量とを加算する加算部51c,52cと、この加算部51c,52cの加算結果を制限し、制限した値を電圧指令値Vd*,Vq*として出力するリミッタ51d,52dと、電圧指令値Vd*,Vq*から非干渉化制御量を減算する減算部51e,52eとを備えている。PI演算部51a,52aは、減算部51e,52eの減算結果の前回値をPI演算値Vdo,Vqoを演算するために使用する。
(もっと読む)
車両操舵装置
【課題】方位角フィードバック方式の車両操舵装置であって、回避運動を破綻(発散やオーバーシュート)させず、回避距離を短縮することができ、衝突回避を成功させる確率をより高められる車両操舵装置を提供する。
【解決手段】この車両操舵装置10は、運転者が操舵操作する操作素子11と、操舵角センサ14と、転舵輪の向きを変更する前輪転舵機構200と、車両のヨーレートに係るヨーレート信号SG3を取り出す車両ヨー応答特性抽出部34と、操作素子の操作量の変化量に応じた操作量変化信号を生成する微分演算部31B−1と、操舵角センサから出力される操作量信号SG1と、微分演算部から出力される操作量変化信号SG1’とを加算する加算部32と、加算部から出力される加算値からヨーレート信号とヨーレートの積分信号とを減算する減算部32と、減算部から出力される偏差信号に応じ前輪転舵機構を駆動する駆動制御部とから構成される。
(もっと読む)
車両の旋回挙動制御装置
【課題】車両の旋回性能を向上させつつドライブフィールのよい車両の旋回挙動制御装置を提供する。
【解決手段】第1及び第2のヨー運動調整手段31,33を制御して、車両のヨー運動を抑制する場合、ヨー運動調整手段31、33に制御量を配分し、旋回内輪の駆動力が増加するように第1のヨー運動調整手段31を制御しながら旋回外輪の制動力が増加するように第2のヨー運動調整手段を制御し、車両のヨー運動を促進する場合、両ヨー運動調整手段に制御量を配分して、旋回外輪の駆動力が増加するように第1のヨー運動調整手段31を制御しながら旋回内輪の制動力が増加するように第2のヨー運動調整手段33を制御し、車両が加速の場合に、第1のヨー運動調整手段31に配分する制御量の割合を、減速の場合の割合よりも大きくし、減速の場合に、第2のヨー運動調整手段33に配分する制御量の割合を、加速の場合の割合よりも大きくする。
(もっと読む)
車両用制御装置
【課題】ラックエンド位置に相当する操舵角度でステアリングシャフトの回転にブレーキをかけられるようにする。
【解決手段】車両用制御装置1は、回転自在に支持されたステアリングシャフト3を有し、ステアリングシャフト3にはステアリングホイール2側から順番にトルクセンサ12と、回転伝達機構13と、電磁ブレーキ手段14とが取り付けられている。回転伝達機構13は、駆動モータ15の回転を伝達する構成を有する。駆動モータ15は、ステアリングシャフト3に直交して配置され、第1のエンコーダ17が内蔵されている。電磁ブレーキ手段14は、車体側に固定された電磁石21と、ステアリングシャフト3に固定された可動プレート22を有する。
(もっと読む)
電動パワーステアリング装置
【課題】ロールオーバが発生しないように、電動パワーステアリング装置が通常有するSAT信号を用いてロールオーバ状態を予見し、運転者が早い操舵入力をすることができないようなアンチロールオーバ性を有する機能を具備した高性能な電動パワーステアリング装置を提供する。
【解決手段】車両のロール運動を含まないSAT値TSAT1と、前記車両のロール運動を含むSAT値TSAT2との差に基づくロール予見量が所定値より大きい場合に、早い操舵入力をできないようにモータアシストを補正する機能を設ける。
(もっと読む)
電気式動力舵取装置
【課題】 モータに電力を供給する昇圧回路、コンバータ等の電圧印加手段の出力の制限が設定されたときに、該出力の制限を超えることが無い電気式動力舵取装置を提供する。
【解決手段】 昇圧回路35Aの温度上昇を検出した際に(S12:Yes)、昇圧回路35Aの出力の制限を設定し(S14)、制限された出力に応じてモータに印加する制限下での電圧値Vq_limを求める(S18)。そして、昇圧回路35Aの出力の制限が設定されたときに、モータのフィードバック制御のために電流制御部30cより演算された指令電流値に基づき求めた電圧指令値Vq*が、求められた制限下での電圧値Vq_limを超える際には(S22:Yes)、制限下での電圧値の電圧Vq_limをモータMに印加する(S24)。
(もっと読む)
1 - 20 / 27
[ Back to top ]