
Fターム[3D232DA21]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041)
Fターム[3D232DA21]の下位に属するFターム
位置 (74)
車速 (4,162)
前後加速度(ジャークを含む) (471)
横方向変位 (67)
横速度 (52)
横加速度(ジャークを含む) (956)
ヨー角変位 (138)
ヨーレイト(ヨー角速度) (1,419)
ヨー角加速度(ジャークを含む) (47)
ロール (107)
ピッチ (34)
車体横滑り角、角速度、角加速度 (165)
車輪横滑り角、角速度、角加速度 (95)
上下方向変位(動的なもの) (24)
上下方向速度、加速度(ジャークを含む) (55)
ホイールアライメント量(トー、キャンバ、キャスタ) (52)
Fターム[3D232DA21]に分類される特許
1 - 20 / 123
電動パワーステアリング装置
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
車両姿勢制御装置

【課題】湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7と、車両1の目標姿勢を決定する演算装置49とを備え、前輪制御装置6および後輪制御装置7が、車両1の姿勢を、演算装置49により決定された目標姿勢に近づける。演算装置49は、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。
(もっと読む)
車両用サスペンション装置、そのジオメトリ調整方法および自動車
【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
ハイブリッド車両のパワーステアリング装置
【課題】ハイブリッド車両の走行状態に関わらず、良好な燃費性能を確保しつつ、大きな操舵トルクを出力可能なハイブリッド車両のパワーステアリング装置を提供する。
【解決手段】ハイブリッド車両1のパワーステアリング装置20は、モータ回生走行時やモータ発進時にエンジン2が停止状態にあり、且つ、クラッチ3が切断状態にある場合、ハイブリッド車両1の走行速度に応じて、パワーステアリング装置において操舵トルクを増幅する増幅手段24の駆動源である、電動モータ25とエンジン2を選択的に切り替える。
(もっと読む)
車線維持支援装置
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】回生制御の実行時においてもモータの各相電流値を検出することができるモータ制御装置を提供すること。
【解決手段】マイコンは、三角波δが山となるタイミングTbで上段側の各FETを全てオンにするような制御信号を出力する第1周期C1、及び下段側の各FETを全てオンにするような制御信号を出力する第2周期C2を交互に繰り返すことにより、その回生制御を実行する。そして、この回生制御の実行時、マイコンは、第1周期C1において三角波δが山となるタイミングTbで取得された各電流センサの出力値をオフセット電流値Ix0として、第2周期C2において第1周期C1と同じタイミングTbで取得された補正前電流値Ix1を補正することにより、モータの各相電流値を検出する。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
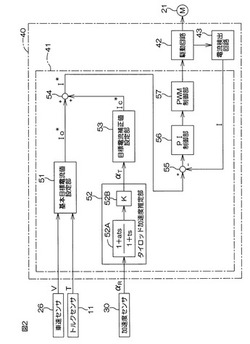
電動パワーステアリング制御装置
【課題】自然なフィーリングを実現することが容易な電動パワーステアリング装置を提供する
【解決手段】アシストトルクを決定するアシスト決定部120は、ハンドルトルク推定値Thに基づいてハンドル側アシストトルクを決定するハンドル側アシスト決定部121と、路面反力トルク推定値Tlに基づいて路面側アシストトルクを決定する路面側アシスト決定部122とを備え、ハンドル側アシスト決定部121をフィルタとし、路面側アシスト決定部122は、路面反力トルク推定値Tlを定数倍する増幅器とする。
(もっと読む)
車両用路面反力推定装置
【課題】本発明は、路面からステアリングラックにかかる力を精度良く推定可能とすることを目的としている。
【解決手段】このため、車速検出手段と、ハンドル切れ角検出手段と、車速検出手段の車速とハンドル切れ角検出手段のハンドル切れ角とを用いてセルフアライニングトルクを算出するセルフアライニングトルク算出手段と、路面反力推定手段を備える車両用路面反力推定装置において、車速に基づいて変換係数を設定する変換係数算出手段と、セルフアライニングトルク算出手段のセルフアライニングトルクの単位時間当たりの変化量を算出するセルフアライニングトルク変化量算出手段を備え、路面反力推定手段は、セルフアライニングトルク算出手段のセルフアライニングトルクと変換係数算出手段の変換係数とセルフアライニングトルク変化量算出手段のセルフアライニングトルク変化量とドライフリクション値と粘性摩擦係数とに基づいて路面反力を推定する。
(もっと読む)
作業車
【課題】農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】電動モータの回転を制御して、ステアリングハンドルの操作量に対応するステアリング装置の入力軸の操作量の比であるステアリングレシオを変更可能な可変レシオモードと、電動モータの回転を制御して、予め設定された設定位置又は設定方向に沿って走行機体を自動操向させる直進モードとを実行可能な制御装置を備えている。
(もっと読む)
車両用操舵装置、操舵力推定装置、操舵制御方法および操舵力推定方法
【課題】車両用操舵装置において、操舵トルクあるいはラック軸力をより高精度に推定できるようにする。
【解決手段】車速を検出する車速検出手段14と、ステアリング軸3に入力した操舵操作における操舵角を検出する操舵角検出手段4と、ステアリング軸3に入力した操舵操作に対し、操舵補助力の付与あるいは操向輪9FR、9FLの操舵角制御を行う電動モータ5と、ステアリング軸3の回転を操向輪に伝達するステアリングラック部材7と、操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、電動モータ5の駆動制御を行うモータ制御手段とを備える車両用操舵装置とした。
(もっと読む)
車両用操舵装置および操舵制御方法
【課題】ステアバイワイヤシステムにおいて付与する操舵反力をより適切なものとすること。
【解決手段】操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、ステアバイワイヤシステムにおける操舵反力用モータ5aの駆動制御を行う操舵反力用モータ制御手段とを有する車両用操舵装置とした。
(もっと読む)
電動パワーステアリング装置
【課題】電流センサが故障した場合でも、アシスト制御中にモータの断線や短絡といった異常を検出できるようにする。
【解決手段】電流センサ異常検出部91により電流センサ31の異常が検出された場合、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算し、電圧値重畳部83が、基本電圧V0に、交流電圧信号生成部82から出力された交流電圧信号である重畳信号V1を加算して電圧指令値V*を求める。モータ異常検出部92は、操舵トルクtrの振動の大きさを計算し、振動の大きさが基準値未満となる場合には、モータ20の通電路に異常が生じていると判定する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリング機構が操舵限界(端当て)に達したことを、電流指令値の変化率又は位相進み値に基づいて判定し、操舵補助力を供給する電動モータの駆動力を制限して端当て時の衝撃を低減した電動パワーステアリング装置を提供する。
【解決手段】操舵トルクTと車速Vに基づいて演算された電流指令値Iref はモータ制御部20に出力され、電動モータ30を駆動するパルス幅変調信号のデューテイ比Dが演算される。電流指令値変化率演算部25は電流指令値Iref の変化率を示す微分値を演算し、閾値メモリ26bの閾値と比較される。閾値を越えていない場合は演算されたデューテイ比DVNが選択され、閾値を越えている場合は制限デューテイ比DVLが選択され、インバータ24を介して電動モータ30が駆動される。フイルタにより位相のみを進ませた電流指令値と閾値と比較、上と同様にデューテイ比DVN/DVLを選択することもできる。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
操舵反力制御装置
【課題】運転者の状態に応じたより適切な補助反力をステアリングに付与可能とする操舵反力制御装置を提供する。
【解決手段】操舵反力制御は、運転者の疲労状態及びステアリングホイールの把持位置などの運転者の把持姿勢に応じて、ステアリングに付加する補助トルクを補正する。補助トルクは、例えば操舵トルクや操舵フリクションである。例えば反力装置コントローラ6は、検出する運転者の把持位置がステアリングホイール7の中心に対して上側に位置していると判定しているときに、運転者が疲労状態になったと推定すると、疲労状態でないと推定した場合に比べて、補助トルクを増大補正する。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備え、前記モータ相対角度情報算出部は、前記操舵トルクに基づいてモータ相対角度変化量を算出し、算出したモータ相対角度変化量を前回サンプリング時のモータ相対角度に加算してモータ相対角度を算出する補完用相対角度情報演算部を有し、前記モータ角速度が零近傍の不感帯内にあるときに、前記補完用相対角度情報演算部で算出したモータ相対角度に基づいてモータ相対角度情報を演算する。
(もっと読む)
運転者の疲労推定装置
【課題】より精度良く運転者の疲労度を推定することを目的とする。
【解決手段】操作子であるステアリングホイール7に入力する外乱トルクに対する上記ステアリングホイール7を操作する運転者のインピーダンスを推定し、推定したインピーダンスと、予め設定若しくは計測した事前のインピーダンスとの差分に基づき、運転者の疲労度を推定する。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
車両の制御装置
【課題】加減速度のある旋回に拡張したスタビリティファクタを適正化することのできる制御装置を提供することを目的とする。
【解決手段】車両が実際に旋回走行した際の互いに異なる値の三つの前後加速度を求め(ステップS2,S7,S9)、それらの前後加速度が求められた各走行時の実スタビリティファクタを求め(ステップS4)、加減速度のある旋回時に拡張したスタビリティファクタの関係式に前記前後加速度と前記実スタビリティファクタを代入して三元連立一次方程式を立てて前記係数および他の係数ならびに定数項の定数についてそれぞれの値を求め(ステップS10)、その求められた前記係数および他の係数ならびに定数項の定数を前記関係式に代入して、加減速度のある旋回に拡張したスタビリティファクタの定義式を更新する(ステップS11)。
(もっと読む)
1 - 20 / 123
[ Back to top ]