
Fターム[3D232DA76]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 障害物 (662)
Fターム[3D232DA76]の下位に属するFターム
Fターム[3D232DA76]に分類される特許
1 - 20 / 301
操舵制御装置
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
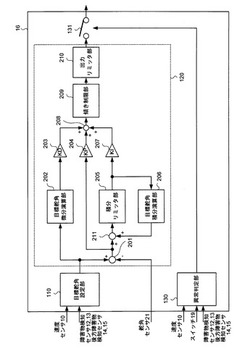
【解決手段】制御部16は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部110と、操舵輪(W)の実舵角を検出する実舵角検出部21と、目標舵角設定部110によって設定された目標舵角と、実舵角検出部21によって検出された実舵角との偏差を算出し、偏差に基づく積分値に基づいて算出される操舵部の動作量を制御する操舵制御値を、操舵部に出力する操舵制御値演算部120と、操舵制御値演算部120によって算出される積分値の上限を制限する積分値制限部205と、を備える。
(もっと読む)
操舵制御装置

【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部(16)は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部(110)と、操舵輪(W)の実舵角を検出する実舵角検出部(21)と、目標舵角設定部(110)によって設定された目標舵角と、実舵角検出部によって検出された実舵角との偏差に基づいて算出される操舵部(2)の動作量を制御する操舵制御値を操舵部(2)に出力する操舵制御値演算部(120)と、操舵制御値演算部(120)によって算出される所定時間当たりの操舵制御値の変化を制限する傾き制限部(209)と、を備える。
(もっと読む)
走行進路生成装置および走行制御装置
【課題】 生成した走行進路に基づいて実進路の走行を行うにあたり、実進路をスムーズなものとし、車両の乗員に与える違和感を小さくすることができる走行進路生成装置および走行制御装置を提供する。
【解決手段】 走行進路生成ECU10における走行進路演算部13は、ルート算出部12で算出したルート12に含まれる今回目標通過点と、走行進路記憶部14に記憶された前回走行進路に含まれる前回目標通過点を用いて、今回走行進路を生成する。ここで、前回目標通過点には、車両の近傍における固定目標通過点と固定目標通過点以外の探索目標通過点が含まれており、今回走行進路を生成するにあたり、固定目標通過点は固定とし、探索目標通過点を適宜今回目標通過点に変更して今回走行進路を生成する。
(もっと読む)
車両の障害物回避装置
【課題】
減速による障害物回避と横移動による障害物回避とを適切に選択できる車両の障害物回避装置を提供すること。
【解決手段】
自車両前方の障害物を認識する障害物認識部11と、自車両が走行している左右両側の車線の車線境界線を認識する車線境界線認識部12と、認識された障害物と認識された車線境界線との間隔Wl,Wrを認識する間隔認識部14と、認識された間隔Wl,Wrが予め設定された自車両の幅Wv以下である方向への横方向への障害物回避を禁止し、間隔Wl,Wrが自車両の幅Wvより大きい方向への横方向への障害物回避を許可し、自車両が認識された車線境界線を跨いで走行しているときには横方向への障害物回避を許可し、横方向への障害物回避が禁止された場合には車両を減速させる回避方向選択部15と、を備えた。
(もっと読む)
車両の操舵支援装置及び操舵支援方法
【課題】操舵操作に対する運転者の意図の反映度合いが低下することを抑制可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】自車両が有する操舵輪の目標とする回転角度である目標操舵角を算出し、操舵輪の現在の回転角度である現在操舵角を検出し、目標操舵角と現在操舵角との差分である操舵角偏差を算出し、操舵角偏差を縮小させるための操舵支援トルクを算出し、自車両が走行する走行路上において、操舵輪の回転角度を目標操舵角とした状態で自車両が通過すると予測する目標経路上の点である目標点に自車両が到達した時点における、自車両の車幅方向右側及び車幅方向左側のうち少なくとも一方に存在する障害物と自車両との間の距離である余裕代を算出し、算出した余裕代が大きいほど小さい値に算出した操舵支援トルクを操舵輪へ出力する。
(もっと読む)
運転支援装置
【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
(もっと読む)
駐車支援装置
【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
駐車領域自動可変型駐車補助システム及びその方法
【課題】駐車時の乗客の体格を把握し、駐車壁面と車両との距離を可変にできる駐車領域自動可変型駐車補助システム及びその方法を提供する。
【解決手段】本発明に係る駐車領域自動可変型駐車補助システムは、駐車時の車両の乗客の体格を感知する乗客体格感知部200と、前記乗客の体格に応じて駐車場の壁面と車両との駐車後の距離を設定したあと駐車軌跡を算出する制御部600と、前記制御部により制御され、前記算出された駐車軌跡に沿って車両の操向を自動制御する自動操向部500とを含むことを特徴とする。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車両用走行制御装置
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
車両の操舵支援装置及び操舵支援方法
【課題】操舵支援トルクの急激な変化や断続的な変化を抑制することが可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】走行路における目標通過位置へ到達するまでに自車両が目標とする姿勢角及び横位置を算出する誘導状態算出部16と、誘導状態算出部16が算出した姿勢角及び横位置と、自車両の現在の姿勢角、横位置及びヨーレートに基づき、誘導経路を生成する誘導経路生成部18と、誘導経路を自車両が走行するための目標操舵角を算出する目標操舵角算出部22と、現在操舵角を検出する操舵角センサ20と、目標操舵角と現在操舵角との差分である操舵角偏差を算出する操舵角偏差算出部24と、操舵角偏差を縮小させるための操舵支援トルクを算出する操舵支援トルク算出部26と、操舵支援トルクを操舵輪へ出力する操舵支援トルク出力部32を備える。
(もっと読む)
車両のヨーモーメント発生旋回効率化装置
【課題】急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行えるヨーモーメント発生旋回効率化装置を提供する。
【解決手段】左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20に適用される。操舵手段18の指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う制御手段9を設ける。
(もっと読む)
電動パワーステアリング装置および車両用制御装置
【課題】急発進する必要がある場合により早く発進できる状態とすることができる技術を提供する。
【解決手段】操舵トルクを検出するトルクセンサと、電動モータ110と、ステアリングホイールの操作角度を検出する操舵角センサと、車両に設けられ予め定められた停止条件が成立した場合にエンジンを自動的に停止させるとともにエンジンが停止している状態で予め定められた始動条件が成立した場合にエンジンを自動的に再始動させるエンジン制御装置6に対して、予め定められた停止条件が成立した場合であってもエンジンの停止を禁止する旨を要求し、および/または予め定められた始動条件が成立していなくてもエンジンの再始動を要求するモータ制御部40と、を備え、モータ制御部40は、操舵トルクが基準トルクを超えている場合、あるいは操作角度が基準角度を超えている場合には、エンジンの停止を禁止する旨を要求、またはエンジンの再始動を要求する。
(もっと読む)
障害物検出装置及び車両制御装置
【課題】障害物の検出精度を向上させることが可能な障害物検出装置を提供する。
【解決手段】障害物検出装置100は、障害物6を検出する検出領域Cを、車両1の進行方向A1に設定する検出領域設定部53と、検出領域C内に位置する障害物6を検出する情報取得装置3及び判断部55と、車両1における操舵操作の操舵方向aを検出する操舵方向検出装置4と、を備え、検出領域設定部53は、検出領域Cにおいて、操舵方向aに対して反対方向に位置する反対部分C2を、車幅方向外側に向って拡大する。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】ドライバが前方障害物を操舵回避する一連の操舵状況を適切に予測して、前方障害物の操舵回避から回避後までに発生するドライバの操舵トルクに対するアシストトルクを適切に設定して安全性及び信頼性を向上させる。
【解決手段】操舵制御部20は、車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、画像認識装置31で前方障害物を検出した際には、障害物と自車両との幅方向のラップ率RLを演算し、ラップ率の絶対値|RL|が予め設定した閾値RLSより大きい場合には基本アシストトルクを増大補正して、予め設定した閾値RLS以下の場合には基本アシストトルクを減少補正して、計算した値を制御量(アシストトルクTa)としてモータ駆動部21に出力する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力及び回避軌道を導出する。
【解決手段】所望の位置、該位置での速度の方向、及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、自車両と所望の位置との距離のx成分Xe、距離のy成分Ye、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を求めるために導入した第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、第3の導入パラメータη3の特定仮定下での値η3’との関係を定めた低速化3次元マップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を導出する。
(もっと読む)
走行計画生成方法および走行計画生成装置
【課題】 車両の搭乗者の乗り心地を十分に向上させることができる走行計画生成方法および走行計画生成装置を提供する。
【解決手段】 走行制御ECU1における走行計画生成部10は、車両の車速に基づいて走行軌跡における最大横加速度および最大横ジャークを設定する。また、設定した最大横加速度および最大横ジャークに基づいて、(最大横加速度×π/2)/最大横ジャークから転舵時間を算出する。これらの最大横加速度、最大横ジャーク、および転舵時間に基づいて走行軌跡を生成する。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
1 - 20 / 301
[ Back to top ]