
Fターム[3D232DD05]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | 制御ゲインの設定 (997)
Fターム[3D232DD05]の下位に属するFターム
制御ゲインが変更可能なもの (614)
Fターム[3D232DD05]に分類される特許
1 - 20 / 383
操舵制御装置
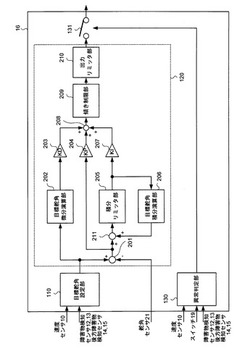
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部16は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部110と、操舵輪(W)の実舵角を検出する実舵角検出部21と、目標舵角設定部110によって設定された目標舵角と、実舵角検出部21によって検出された実舵角との偏差を算出し、偏差に基づく積分値に基づいて算出される操舵部の動作量を制御する操舵制御値を、操舵部に出力する操舵制御値演算部120と、操舵制御値演算部120によって算出される積分値の上限を制限する積分値制限部205と、を備える。
(もっと読む)
車両用サスペンション装置、そのジオメトリ調整方法および自動車

【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
ステアリング装置およびフォークリフト
【課題】機械的な接触を行うことなく、実際の操舵角を目標操舵角で適切に維持できるようにする。
【解決手段】実際の操舵角(検出操舵角)が目標操舵角に到達するまでは、ステアリング51の操作トルクに応じて操舵輪に付与される操舵トルクが、漸減舵角範囲にわたって上限値から下限値にまで減少していく一方、目標操舵角に到達した以降は、逆方向の操舵トルクが、この漸減舵角範囲よりも狭い急峻舵角範囲にわたって下限値から上限値にまで増加していく。このように、操舵トルクが変化する操舵角範囲を、目標操舵角への到達以降において狭くすることで、操舵トルクの変化率が大きくなるため、その到達前に比べて操舵トルクが急峻に上限値まで増加していく。こうして、実際の操舵角が目標操舵角に到達した以降は、逆方向の操舵トルクが十分に大きくならない、というような操舵角範囲も当然狭くなる(漸減舵角範囲>急峻舵角範囲)。
(もっと読む)
電動パワーステアリング制御装置
【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
運転支援装置
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
電動パワーステアリング装置
【課題】二重制御系統を備えた電動パワーステアリング装置において、サブマイクロコンピュータの実装を必要としない電動パワーステアリング装置を提供する。
【解決手段】制御装置5A,5Bを2系統有し、各制御装置5A,5Bは、相手系統の故障を推定する故障推定部56,66を備え、故障推定部56,66は、電動モータ1a,1bの出力値が目標指令値に収束する時間Teを監視し、この収束時間Teが基準時間γよりも長い場合に、他系の制御装置の故障を推定するものであり、他系の制御装置の故障を推定した正常側の制御装置は、正常側の制御装置の制御周期T0を短くしかつ制御ゲインK0を上げる制御を行う。
(もっと読む)
車線維持支援装置
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
ステアバイワイヤ式操舵機構の制御装置
【課題】 車両運動モデルを導入した複雑な制御系を構築することなく、路面左右の摩擦係数の違いや横風等に対する外乱安定化制御を簡単に実現する。
【解決手段】 舵角指令の主な値となるフィードフォワード値を生成するフィードフォワード値生成手段21と、外乱補正用のフィードバックによる補正量を生成する外乱補正量生成手段22と、前記フィードフォワード値と補正量とを加算して前記転舵モータ15を駆動する舵角指令を生成する比較手段23とを有する。外乱補正量生成手段22は、車両速度とハンドル角から、車両20に生じる横加速度を演算し、外乱検出手段25による横加速度の実測値が目標値に追従するように前記補正量を演算する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
電動パワーステアリング制御装置
【課題】自然なフィーリングを実現することが容易な電動パワーステアリング装置を提供する
【解決手段】アシストトルクを決定するアシスト決定部120は、ハンドルトルク推定値Thに基づいてハンドル側アシストトルクを決定するハンドル側アシスト決定部121と、路面反力トルク推定値Tlに基づいて路面側アシストトルクを決定する路面側アシスト決定部122とを備え、ハンドル側アシスト決定部121をフィルタとし、路面側アシスト決定部122は、路面反力トルク推定値Tlを定数倍する増幅器とする。
(もっと読む)
電動ステアリング装置
【課題】運転者にとって期待される安定した修正操舵の実施を可能とする電動ステアリング装置を提供する。
【解決手段】操舵トルクTに基づいて制御装置200Aにより制御されて操舵補助力を発生する電動機を11備えた電動パワーステアリング装置において、操向ハンドルに設けられて、運転者の操作により電気信号を出力する操作スイッチ2aL,2aRと、操作スイッチ2aL,2aRからの電気信号に応じて電動機11を駆動する電流を付加する付加電流値波形を演算して出力する付加電流演算部300Aと、を備えている。付加電流演算部300Aは、中立位置近傍の所定の操舵角の範囲において操作スイッチ2aL,2aRが操作されたことを検出したとき、修正操舵のための第1電流と、その修正操舵に対する戻し操舵のための第2電流を、車両の走行状態に応じて生成し、付加電流値IAdとして出力する。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】操舵トルクセンサの異常が検出された場合には、操舵トルクセンサに替えて、横Gに基づくアシスト力目標値に相当するモータトルクを発生させ、駆動電力の供給を実行することによりアシスト制御を継続する。その結果、横Gに基づくアシスト力目標値を発生させているので、路面状況の変化等を運転者に十分伝えることができ、操舵フィーリングの向上が図れる。
(もっと読む)
車両統合制御装置
【課題】左右輪差動制限機構の作動に伴う操舵トルク変化を精度よく抑制し、運転者のステアリング操作時の違和感を解消し、走破性と安定性とを両立させる。
【解決手段】電子制御式の左右輪差動制限機構81の拘束トルク制御量に比例して拘束トルク比例制御手段201が操舵力制御機構へ出力させる付加トルクと、操舵反力フィードバック制御手段204が操舵力制御機構へ出力させる、演算した操舵系反力を打ち消す方向の付加トルクとの割合を、前記左右前輪の回転速度差に応じて切り替える第1の前輪左右速差補正係数規定手段202、第2の前輪左右速差補正係数規定手段205、第1の乗算処理手段203、第2の乗算処理手段206および加算手段207とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することが可能な電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、γ軸電流指令値Iγ*の上限値(電流指令上限値Ilim)を演算する電流指令上限値演算部73と、γ軸電流指令値Iγ*を電流指令上限値Ilim以下に制限する電流指令値制限部74とを備える。そして、電流指令上限値演算部73は、車速Vが速いほど、より低い値となるように電流指令上限値Ilimを変更(演算)する。
(もっと読む)
電動パワーステアリング装置
【課題】第1電流センサのバックアップ用として設けた低分解能の第2電流センサを使っている場合でも、良好な操舵アシストを行う。
【解決手段】第1電流センサ31の異常が検出されている場合には、異常時モータ制御量演算部80が電圧指令値V*を演算する。異常時モータ制御量演算部80は、操舵トルクtrに比例した基本電圧V0に、逆起電圧の推定値に相当する補正電圧V1と、逆起電圧を推定するための交流電圧V2とを加算した値(V0+V1+V2)を電圧指令値V*として設定する。
(もっと読む)
電動パワーステアリング制御装置
【課題】車両状態又は操舵状態に応じて、操舵感を向上させることができる電動パワーステアリング制御装置を提供する。
【解決手段】操舵トルクτn、操舵速度ωnまたは車速に応じて、d軸のフィードバックゲインまたはd軸電圧を補正することによって、d軸の電流応答性を変化させ、ハンドルが動き過ぎることに対しては動きを抑制し、動き難いことに対しては動き易くする。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】第2制御部は、目標操舵トルクτ*に実際の操舵トルクを追従させるべく、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより制御上の仮想的な回転角を演算する。また、第2制御部は、トルク偏差Δτに基づくγ軸電流増減値ηを演算し、当該γ軸電流増減値ηを積算することによりγ軸電流指令値Iγ*を演算する。そして、上記制御上の回転角に従う回転座標系において電流フィードバック制御を実行する。更に、第2制御部(電流指令値演算部61)は、上記γ軸電流指令値Iγ*を電流指令上限値以下に制限する電流指令値制限部73を備える。そして、当該電流指令値制限部73は、上記トルク偏差Δτに基づいて電流指令上限値を変更する。
(もっと読む)
1 - 20 / 383
[ Back to top ]