
Fターム[3D232DD06]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | 制御ゲインの設定 (997) | 制御ゲインが変更可能なもの (614)
Fターム[3D232DD06]に分類される特許
1 - 20 / 614
車両のパワーステアリング制御装置
電動パワーステアリング装置
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
電動パワーステアリング制御装置

【課題】運転者の意思を適切に反映したアシスト制御を可能にする
【解決手段】EPSシステム1では、目標アシストトルク演算部20が、トルクセンサにて検出された操舵トルクTsに基づき、操舵トルクに応じた値の目標アシストトルクを示す目標電流を演算し、モータ駆動回路50が、演算された目標電流に基づいてモータ6を駆動させる。また、操舵角センサが操舵角θsを検出するとともに、微分器62が操舵角速度ωsを演算し、さらに操舵状態量演算部22が、操舵角θsと操舵角速度ωsとに基づいて、操舵状態量を演算する。そして目標アシストトルク演算部20は、演算された操舵状態量に基づき、目標アシストトルクを示す目標電流を変更する。したがって、操舵トルクTsだけではなく操舵角速度ωsによっても目標アシストトルクを変更することができる。
(もっと読む)
操舵制御装置
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部(16)は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部(110)と、操舵輪(W)の実舵角を検出する実舵角検出部(21)と、目標舵角設定部(110)によって設定された目標舵角と、実舵角検出部によって検出された実舵角との偏差に基づいて算出される操舵部(2)の動作量を制御する操舵制御値を操舵部(2)に出力する操舵制御値演算部(120)と、操舵制御値演算部(120)によって算出される所定時間当たりの操舵制御値の変化を制限する傾き制限部(209)と、を備える。
(もっと読む)
車両用操舵装置
【課題】転舵輪側からタイロッドに入力する高周波振動を新規な方法で推定して操作部材に伝達することができ、操舵感が向上する車両用操舵装置を提供する。
【解決手段】ラックハウジング18に加速度センサ30が取り付けられている。FFT処理部52Aは、加速度センサ30の出力信号を、時間領域信号から周波数領域信号に変換する。逆入力振動成分抽出部52Bは、FFT処理部52Aによって得られた周波数領域信号から、周波数fが所定範囲内(fL≦f≦fH(fH>fL))にあり、かつパワー密度ρが所定範囲内(ρL≦f≦ρH(ρH>ρL))にある信号を抽出する。IFFT処理部52Cは、逆入力振動成分抽出部52Bによって抽出された周波数領域信号を時間領域信号(逆入力振動推定値)に変換する。
(もっと読む)
四輪操舵制御装置
【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
操舵機構の制御装置
【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
車両用前後輪転舵制御装置
【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
車両用走行支援装置
【課題】 車線逸脱の抑制とドライバに与える違和感の軽減との両立を図ることができる車両用走行支援装置を提供する。
【解決手段】 走行路上の自車前方に、車速Vに応じた前方注視点距離Lsだけ離れた目標走行位置Pを設定し、自車が設定した目標走行位置Pを走行するように自車の走行を支援する車両用走行支援装置において、走行路に対する自車の向きを判定する姿勢判定部14aと、自車が走行路外側を向いている場合、自車の向きが走行路と平行である場合よりも車速Vに応じた前方注視点距離のベース値Ls_baseを短縮した前方注視点距離Lsを設定する前方注視点距離設定部14と、を備えた。
(もっと読む)
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
操舵支援装置
【課題】車線の逸脱を防止するためにガイダンストルク指令値を増加補正することができ、しかもガイダンストルク指令値が不必要に増加補正されるのを抑制できる操舵支援装置を提供する。
【解決手段】ゲイン設定部51は、TLC演算部41によって演算された車線逸脱予想時間TLCに基づいて、ガイダンストルク指令値補正用のゲインGを演算する。車線逸脱予想時間TLCが所定値C未満の領域においては、ゲインGは、車線逸脱予想時間TLCの減少に応じて下限値(=1)から上限値Gmax(>1)まで単調に増加するように設定されている。ゲイン乗算部52は、ガイダンストルク指令値補正用のゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*’を求める。
(もっと読む)
操舵支援装置
【課題】車両がカントのある路面を走行している場合に、路面の低い側に車両を換向させるガイダンストルクが与えられたときに、操舵角速度および操舵角変化量が過度に大きくなるのを抑制することができる操舵支援装置を提供する。
【解決手段】操舵角速度閾値設定部52は、ガイダンストルク指令値TG*と車速Vとに基づいて、操舵角速度閾値Vhthを設定する。速度偏差演算部52は、操舵角速度演算部51によって演算された操舵角速度の絶対値|Vh|と操舵角速度閾値Vhthとの偏差ΔVhを演算する。ゲイン設定部54は、速度偏差ΔVhhに基づいて、ゲインGを演算する。ゲイン乗算部55は、ゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*を求める。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】トルクセンサから検出された操舵トルクτの形状を生成する操舵トルク波形形状補正手段(32)によって、操舵トルクτの波形形状を運転状態に最適な波形形状の補正操舵トルクTcに補正する。そして、その補正操舵トルクTcと、操舵トルクτの乗算により算出されたリードプル補正量Iip*の値により、アシスト力を増減する。
(もっと読む)
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
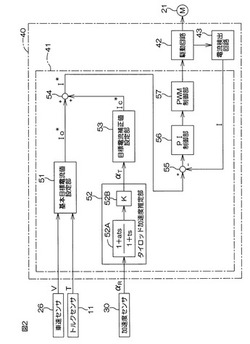
車両のパワーステアリング制御装置
【課題】アシストトルクに対する補正量のピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる車両のパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、ドライバによる操舵状態が切り増し状態のときと切り戻し状態のときとで選択的に切り替わる操舵ゲインG0を生成し、当該操舵ゲインG0を無次元数G0’に変換してレートリミット処理を行い、レートリミット処理後の操舵ゲインGを用いて基本アシストトルクTbを補正して最終的なアシストトルクTaを演算する。これにより、基本アシストトルクTbに対するアシスト補正量ΔTaのピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる。
(もっと読む)
車両のパワーステアリング制御装置
【課題】特に、中立位置からのステアリングホイールの切り出しにおいて、ドライバが感じるフリクション感を適切に打ち消して滑らかで良好な操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ハンドル角の絶対値|θH|が高いほど操舵する方向への基本アシストトルクTbを増大させる方向に補正する第1の補正値ΔT1を設定し、ハンドル角速度の絶対値|dθH/dt|が高いほど操舵する方向への基本アシストトルクTbを減少させる方向に補正する第2の補正値ΔT2を設定し、少なくともステアリングホイールの中立位置からの切り始めにおいて第1の補正値ΔT1と第2の補正値ΔT2との差を第1の補正値ΔT1で補正する方向におけるアシスト補正量ΔTaとして算出し、こうして求めたアシスト補正量ΔTaで基本アシストトルクTbを補正して制御量としてモータ駆動部21に出力する。
(もっと読む)
1 - 20 / 614
[ Back to top ]