
Fターム[3D233CA15]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 操舵の状況 (7,023)
Fターム[3D233CA15]の下位に属するFターム
操舵力、操舵トルク、反力 (3,530)
ステアリング系の操舵角、操舵方向 (2,121)
車輪の操舵角、操舵量、操舵方向 (888)
操舵速度、操舵加速度 (422)
Fターム[3D233CA15]に分類される特許
1 - 20 / 62
操舵機構の制御装置
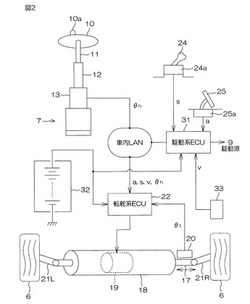
【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
車両用走行支援装置

【課題】 車線逸脱の抑制とドライバに与える違和感の軽減との両立を図ることができる車両用走行支援装置を提供する。
【解決手段】 走行路上の自車前方に、車速Vに応じた前方注視点距離Lsだけ離れた目標走行位置Pを設定し、自車が設定した目標走行位置Pを走行するように自車の走行を支援する車両用走行支援装置において、走行路に対する自車の向きを判定する姿勢判定部14aと、自車が走行路外側を向いている場合、自車の向きが走行路と平行である場合よりも車速Vに応じた前方注視点距離のベース値Ls_baseを短縮した前方注視点距離Lsを設定する前方注視点距離設定部14と、を備えた。
(もっと読む)
操舵制御装置
【課題】操舵制御装置において、車両が路面の轍や落下物を通過して車両の進路に影響するような外乱が入ったとしても、車両の安定性を確保して直進を継続しやすくすることにある。
【解決手段】操舵用制御手段(12)は、判定手段(12A)により運転者が操舵ハンドル(6)を握っていないと判定された時に、操舵ハンドル(6)をセンター位置に維持するように操作力軽減アクチュエータ(10)の作動を制御する制御信号をアクチュエータ制御手段(11)に出力する。
(もっと読む)
ウォームギヤ機構及びこれを用いた電動パワーステアリング装置
【課題】トルク伝達用ウォームホイールの歯に対する補助ウォームホイールの歯の相対的な位置を、適切に設定する。
【解決手段】ウォーム80とトルク伝達用ウォームホイール90と補助ウォームホイール100とから成るウォームギヤ機構44である。該補助ウォームホイールは、該トルク伝達用ウォームホイールの回転中心線CLに位置するとともに、該トルク伝達用ウォームホイールに重ね合わされて取り付けられる。該補助ウォームホイールと該トルク伝達用ウォームホイールとのいずれか一方は複数の位置決め受け部111を有し、いずれか他方は該複数の位置決め受け部に嵌め込み可能な複数の位置決め凸部112を有する。複数の位置決め受け部と複数の位置決め凸部とは、トルク伝達用ウォームホイールに対する補助ウォームホイールの1つの位相でのみ、互いに個別に嵌め込み可能である。
(もっと読む)
車両用操舵装置
【課題】多回転操作される操舵部材の回転角を規制可能な小型の車両用操舵装置を提供。
【解決手段】回転規制機構21は、操舵軸9の出力軸24と同軸的に一体回転可能な回転可能要素(ロータコア63の第2部分66)と、回転不能要素(ハウジングの端壁32)との間に、出力軸24によって同軸的に支持され出力軸24に対して回転可能で且つ軸方向X1に移動可能な複数の板要素71〜75を備える。隣接する要素間の相対回転量を突起81と係合溝82,83の両端の規制部とによって規制する。出力軸24の中心軸線L1に対する板要素71〜75の中心軸線の傾きを抑制するように、板要素71〜75の軸方向X1の移動量を所定量以下に規制する軸方向移動規制要素701を設けた。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
車両操舵装置及びインホイールモータ車両
【課題】操舵軸に改良を加えることにより、ダンパーを追加しても必要以上に大型化することが避けられ、しかも十分大きい回転トルクを伝達できる車両操舵装置を提供することである。
【解決手段】インホイールモータ形式の車輪と、車台に設置された操舵用の駆動装置と、前記駆動装置の出力軸とインホイールモータユニットとの間に介在された操舵軸とからなる操舵装置において、前記操舵軸が、駆動装置側と一体化された内軸25と、モータユニット側と一体化された外軸26により構成され、外軸26に内軸25が軸方向に相対移動可能に嵌合された継手部28が設けられ、前記継手部28の内部に緩衝装置41及びトルク伝達部40が設けられた構成とした。
(もっと読む)
車両の総重量推定装置
【課題】後輪位置に配置された車高センサと操舵トルクセンサの検出結果を有効に利用して、車両総重量を正確に推定すること。
【解決手段】この総重量推定装置は、「旋回中」であって且つ車両の前後加速度がゼロを含む所定範囲内にあるとき(定速走行時)、「操舵トルク、前輪スリップ角、及び前輪軸重の間の予め定められた関係」と、操舵トルクセンサにより検出された操舵トルクと、演算された前輪スリップ角とに基づいて前輪軸重Wfを推定する。この装置は、「非旋回中」であって且つ車両の前後加速度が前記所定範囲内にあるとき(定速走行時)、後輪位置に配置された車高センサにより検出された後輪位置の車高に基づいて後輪軸重Wrを推定する。この装置は、推定された前輪軸重Wfと後輪軸重Wrとを加えることにより、車両総重量Wを推定する。
(もっと読む)
車両用操舵装置
【課題】伝達比可変機構の動作によって生じる操舵反力を測定するために用いられるトルクセンサが不要となり、トーションバーが不要となる車両用操舵装置を提供する。
【解決手段】目標act角演算部51は、act角θactの目標値である目標act角θact*を演算する。制御信号出力部52は、目標act角演算部51によって演算された目標act角θact*に基づいて、伝達比変更用モータ20の駆動回路29を制御する。目標反力補償角演算部61は、目標act角演算部51によって演算された目標act角θact*が零でない場合には、目標act角θact*に基づいて反力補償用モータ25の目標回転角である目標反力補償角θrec*を演算する。制御信号出力部62は、目標反力補償角演算部61によって演算された目標反力補償角θrec*に基づいて、反力補償用モータ25を制御する。
(もっと読む)
車線逸脱防止装置
【課題】走行車線から逸脱する傾向にある自車両を走行車線にスムースに復帰させるためのステアリング操作を的確に補助する上で有利なレーン逸脱防止装置を提供する。
【解決手段】車線逸脱判定手段38Aは自車両が走行車線から逸脱する傾向にあるか否かを判定する。修正用走行軌跡算出手段38Cは自車両が走行車線から逸脱する傾向にあると判定された場合に、自車両が走行車線の中心線に戻るために自車両が走行すべき軌跡である修正用走行軌跡を算出する。理想操舵トルク算出手段22Bは、ステアリング1402が前記の修正用走行軌跡に沿って自車両が走行するように操作された場合に操舵機構1406で発生する操舵トルクを理想操舵トルクとして算出する。第2の操舵補助トルク決定手段22Cは、ステアリング1402が操作された場合に操舵機構1406で発生する操舵トルクが理想操舵トルクに合致するように操舵補助トルクを決定する。
(もっと読む)
操舵装置
【課題】複数の異なる動作で操作することのできるステアリングハンドルを用いて、操作性を向上させることのできる操舵装置を提供する。
【解決手段】操舵装置1は、複数の異なる動作で操作することのできるステアリングハンドル12を有する入力部3を備えているため、一つのステアリングハンドル12で第一入力、及び第一入力を除く動作における第二入力を出力することができる。一方、第一操舵部4は、第一入力に基づいて操舵を行うと共に、第二操舵部6は、第二入力に基づいて操舵を行うことができる。従って、運転者は、一つのステアリングハンドル12の操作によって、第一操舵部4及び第二操舵部6を同時に操舵することができる。すなわち、運転者はステアリングハンドルを保持した状態で、後側車輪T2も操舵することができる。
(もっと読む)
車両用ステアリング装置
【課題】車両用ステア・バイ・ワイヤ式ステアリング装置において、ステアリングホイールの操舵角を容易に且つ確実に制限すること。
【解決手段】ステアリングホイール21に対して、転舵機構30を機械的に分離するとともに電気的には接続した車両用ステアリング装置10であり、ステアリングホイールに連結された第1回転軸41と、転舵機構に連結された第2回転軸42と、これら第1・第2回転軸同士を一定の相対的な回転角の範囲で互いに空転可能に連結する連結機構43とを有している。
(もっと読む)
操舵装置
【課題】装置コストを低減しつつ、信頼性の高いステアバイヤ方式操舵を行うこと。
【解決手段】操舵反力用モータの回転を制御するレゾルバおよび/または転舵用モータの回転を制御するレゾルバから相対舵角を取得し、直進状態判定部によって車両が直進状態にあると判定された場合に、基準値決定部が、取得された相対舵角の基準値を決定したうえで、絶対舵角算出部が、決定された基準値を始点として取得された相対舵角を積算することで絶対舵角を算出するように操舵装置を構成する。
(もっと読む)
駐車支援装置
【課題】駐車場所の幅に応じた駐車が可能で安価な駐車支援装置を提供する。
【解決手段】車両の操舵輪3を操舵する操舵手段を備え、車両の駐車場所への駐車を支援する駐車支援装置において、駐車場所に対して所定間隔を空けて車両を走行させる際に駐車場所の幅Lを計測する計測手段を設け、計測された幅Lに基づいて左最大舵角θLと右最大舵角θRとを求め、当該左最大舵角と右最大舵角と予め決められた走行距離および走行方向でなる走行パターンに基づいて操舵輪の目標舵角を求め、目標舵角に基づいて舵角を制御する。
(もっと読む)
車両の操舵装置
【課題】 簡単な構成で摩擦力発生装置の摩耗による摩擦力の低下を抑制するステアバイワイヤ方式の車両の操舵装置を提供すること。
【解決手段】 摩擦力発生装置20は、操舵入力軸12に対して相対回転不能かつ軸線方向に変位可能に組み付けられた第1磁性体リング21と、軸12に一体的に組み付けられた第2磁性体リング22とを備える。また、装置20は、リング21,22間に配置されて軸12と一体的に回転可能かつ軸線方向変位可能に組み付けられた2枚一対の非磁性体リング23,24と、リング23,24間に配置された永久磁石25とを備える。さらに装置20はリング21をリング22の方向に付勢するばね26を備える。これにより、装置20は磁石25の磁力とばね26の付勢力との合力に起因する摩擦トルクを発生させる。
(もっと読む)
車両用操舵装置
【課題】荷役車両の車両用操舵装置において、ノブを把持して操舵部材を操作するとき、ノブの位置に応じて運転者が操舵部材に力を掛け難い場合がある。
【解決手段】操舵部材10と転舵輪としての後輪との間の機械的な連結が断たれたステアバイワイヤ式の車両用操舵装置である。ホイール61の中心軸線C2に沿って操舵部材10を見たときに、ノブ63が操舵部材10の上部または下部に変位している場合の操舵反力を、ノブ63が操舵部材10の左部または右部に変位している場合の操舵反力よりも小さくするように、ECUが反力アクチュエータを反力制御する。
(もっと読む)
車両用ステアバイワイヤシステムと車両用ステアバイワイヤシステムの制御方法
【課題】車両用ステアバイワイヤシステムにおいて、ステアバイワイヤシステムでありながら油圧式パワーステアリングシステムに近い操舵フィーリングを達成できるステアバイワイヤシステムを提供すること。
【解決手段】操舵装置のモータ11のトルク推定回路13は、モータ11に加えられた入力トルクの推定トルクT^i1を算出する。その推定トルクT^i1は、(A1−1)倍されてモータ11へ伝達される。転舵装置のモータ21のトルク推定回路23は、モータ21に加えられた入力トルクの推定トルクT^i2を算出する。その推定トルクT^i2は、A2倍されてモータ11へ伝達される。またモータ11のロータ位置θ1とモータ21のロータ位置θ2との偏差は、A3倍されてモータ21へ伝達される。
(もっと読む)
軸連結機構
【課題】長期の使用によっても電動モータの出力回転軸に連結された回転軸とボールねじとの間に軸心周りの方向についてのガタが生じ難く、しかも、電動モータの反転時の衝撃、ブラシ振動の伝達を低減できるのみならず、異音の発生をなくし得る軸連結機構を提供すること。
【解決手段】軸連結機構1は、回転軸2に連結される連結基体3と、回転軸4に連結される連結基体5と、インサート成形されてなる一対の回転伝達部材6及び7を有した回転伝達体8とを具備しており、回転軸2のR方向の回転を回転軸4に伝達するように二つの回転軸2及び4の間に配されて二つの回転軸2及び4を連結するようになっている。
(もっと読む)
ステアリングシステム
【課題】二基の反力発生装置をより多様に、効率的に運用し、バックラッシュによる歯車のガタつきを防止する。
【解決手段】操舵装置3が、コラムシャフト7と、操舵反力Aを発生可能な反力発生装置8,9と、減速機構11とを備え、減速機構11が、コラムシャフト7に取付けられたプライマリーギヤ12を有し、反力発生装置8,9が、プライマリーギヤ12に対して少なくとも二箇所の噛合部19,20を有するように構成されたステアリングシステム1であって、制御装置5が、反力発生装置8,9に対する出力を配分可能な配分手段が、コラムシャフト7の回転域の全域に対して、反力発生装置8,9を共同で駆動させる共同駆動モードと、コラムシャフト7の回転域を区分けして、反力発生装置8,9を、区分けされた区分回転域にそれぞれ対応させて専用に駆動させる専用駆動モードとの、少なくともどちらか一方となるように配分可能に構成している。
(もっと読む)
車両用操舵装置
【課題】操舵時に衝突してエアバッグが作動した場合にも、腕部が運転者の胸部等に干渉するのを防止できるようにした車両用操舵装置を提供する。
【解決手段】ステアリングホイール12の転舵状態で車両の衝突状態を検出した場合に、メインエアバッグ4の展開に先行して操作部12Hを握った運転者の手部Dhを把持して拘束するサブエアバッグ9と、メインエアバッグ4の展開に先行してステアリングホイール12を直進走行状態に戻すステアリングホイール回動手段と、を備える。
(もっと読む)
1 - 20 / 62
[ Back to top ]