
Fターム[3D233CA17]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 操舵の状況 (7,023) | ステアリング系の操舵角、操舵方向 (2,121)
Fターム[3D233CA17]に分類される特許
1 - 20 / 2,121
車両のパワーステアリング制御装置
車両用操舵装置
車両用操舵装置
車両用操舵装置
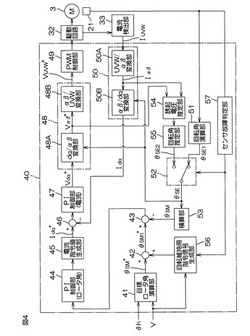
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
ラック軸力推定方法及び電動パワーステアリング装置

【課題】ステアリングホイールの回転運動をステアリングラック軸及びこれに連結されるタイロッドの直線運動に変換し、操舵輪の転舵を行う電動パワーステアリング装置において、常に精度の良いパワーアシスト制御を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】車両の走行状態を表す物理量に基づいてステアリングラック軸16に作用するラック軸力Fを演算により推定し、ラック軸16と前記タイロッド17Rとの、車体の進行方向に垂直な面内に投影した交差角θを求め、前記交差角θに基づいて、推定された前記ラック軸力Fを補正する。
【効果】車両の走行中、車両が左右に傾いてサスペンションストロークが発生したときにラック軸力を過大に評価することがなくなる。
(もっと読む)
操舵制御装置
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部16は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部110と、操舵輪(W)の実舵角を検出する実舵角検出部21と、目標舵角設定部110によって設定された目標舵角と、実舵角検出部21によって検出された実舵角との偏差を算出し、偏差に基づく積分値に基づいて算出される操舵部の動作量を制御する操舵制御値を、操舵部に出力する操舵制御値演算部120と、操舵制御値演算部120によって算出される積分値の上限を制限する積分値制限部205と、を備える。
(もっと読む)
インホイールモータ車用転舵装置
【課題】転舵アクチュエータを用いて、アッパアームに設けた上下方向の転舵軸周りに車輪を回転させるインホイールモータ車用転舵装置において、転舵の際の抵抗を小さくする。
【解決手段】車両のアッパアームに設けた上下方向の転舵軸20周りに転舵手段33を備え、前記転舵手段33は、転舵アクチュエータ10の動作によりホイールwを前記転舵軸20周りに回転させて転舵する機能を有し、前記転舵アクチュエータ10の動作は、前記転舵手段33とは別に設けた操舵入力装置31からの入力信号に基づき制御手段32が制御し、前記制御手段32は、前記ホイールwが転舵する際に前記入力信号に基づいて、そのホイールwに設けた制動手段35の制動を解除又は弛緩する制御を行うインホイールモータ車用転舵装置とした。
(もっと読む)
車両操舵制御システム
【課題】電力不足の状態が発生した場合に、システム重要度に応じた動作制御を行うことのできる技術を提供する。
【解決手段】EPS−ECU50は、VGRS−ECU20に対して、要求信号を送信する。VGRS−ECU20は、要求信号を受信すると、VGRSアクチュエータの制御を決定するとともに、ARSアクチュエータの制御も決定する。要求信号がアクチュエータの動作停止を要求する場合、VGRS−ECU20は、VGRSアクチュエータおよびARSアクチュエータを、それぞれ動作停止するように制御する。
(もっと読む)
操舵制御装置
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部(16)は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部(110)と、操舵輪(W)の実舵角を検出する実舵角検出部(21)と、目標舵角設定部(110)によって設定された目標舵角と、実舵角検出部によって検出された実舵角との偏差に基づいて算出される操舵部(2)の動作量を制御する操舵制御値を操舵部(2)に出力する操舵制御値演算部(120)と、操舵制御値演算部(120)によって算出される所定時間当たりの操舵制御値の変化を制限する傾き制限部(209)と、を備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】運転者の意思を適切に反映したアシスト制御を可能にする
【解決手段】EPSシステム1では、目標アシストトルク演算部20が、トルクセンサにて検出された操舵トルクTsに基づき、操舵トルクに応じた値の目標アシストトルクを示す目標電流を演算し、モータ駆動回路50が、演算された目標電流に基づいてモータ6を駆動させる。また、操舵角センサが操舵角θsを検出するとともに、微分器62が操舵角速度ωsを演算し、さらに操舵状態量演算部22が、操舵角θsと操舵角速度ωsとに基づいて、操舵状態量を演算する。そして目標アシストトルク演算部20は、演算された操舵状態量に基づき、目標アシストトルクを示す目標電流を変更する。したがって、操舵トルクTsだけではなく操舵角速度ωsによっても目標アシストトルクを変更することができる。
(もっと読む)
車両用サスペンション装置、そのジオメトリ調整方法および自動車
【課題】車両前後方向の力に対するコンプライアンスステア特性をより適切なものとする。
【解決手段】車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車軸に沿って配置したトランスバースリンク部材と、車軸よりも車両上下方向の下側においてホイールハブ機構と車体とを連結し、車体との連結部がトランスバースリンク部材と車体との連結部よりも後方に位置すると共に、ホイールハブ機構との連結部がトランスバースリンク部材とホイールハブ機構との連結部よりも前方に位置するコンプレッションリンク部材と、トランスバースリンク部材およびコンプレッションリンク部材のホイールハブ機構との連結部よりも外側においてホイールハブ機構と連結し、該ホイールハブ機構との連結部よりも後側においてステアリングラック部材と連結し、車輪を転舵させるタイロッド部材とを有する車両用サスペンション装置とした。
(もっと読む)
四輪操舵制御装置
【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
ステアリング装置およびフォークリフト
【課題】機械的な接触を行うことなく、実際の操舵角を目標操舵角で適切に維持できるようにする。
【解決手段】実際の操舵角(検出操舵角)が目標操舵角に到達するまでは、ステアリング51の操作トルクに応じて操舵輪に付与される操舵トルクが、漸減舵角範囲にわたって上限値から下限値にまで減少していく一方、目標操舵角に到達した以降は、逆方向の操舵トルクが、この漸減舵角範囲よりも狭い急峻舵角範囲にわたって下限値から上限値にまで増加していく。このように、操舵トルクが変化する操舵角範囲を、目標操舵角への到達以降において狭くすることで、操舵トルクの変化率が大きくなるため、その到達前に比べて操舵トルクが急峻に上限値まで増加していく。こうして、実際の操舵角が目標操舵角に到達した以降は、逆方向の操舵トルクが十分に大きくならない、というような操舵角範囲も当然狭くなる(漸減舵角範囲>急峻舵角範囲)。
(もっと読む)
操舵機構の制御装置
【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
車両用操舵装置
【課題】簡単な構造で安価に操舵反力を発生できる車両用操舵装置を提供すること。
【解決手段】例えば左操舵される操舵部材2によって伝達機構14を介して第1回転方向X1に駆動された空気圧縮機5が、第1ポート51を吸込口とし、第2ポート52を吐出口とする。空気供給口24からの空気が、吸込口となっている第1ポート51に供給される。吐出口になっている第2ポート52から吐出された圧縮空気は、第2可変絞り20、第2逆止弁18、高圧部16aの分岐部29、上流側還流路30、方向制御弁28および第1下流側還流路32を介して、吸込口となっている第1ポート51に還流される。操舵部材2に、空気圧縮機5の駆動の反力による操舵反力が付与される。
(もっと読む)
後輪転舵軸の規制機構
【課題】簡易な構成で後輪転舵軸の回転および並進を規制することが可能な後輪転舵軸の規制機構を提供する。
【解決手段】後輪転舵装置40は、後輪転舵軸50に対して移動可能な規制部材71と、規制部材71を後輪転舵軸50に向けて移動させるソレノイド74とを有する。後輪転舵軸50は、軸方向に延びる回転規制溝72を外面上に有する。回転規制溝72の底面72Bは、規制部材71の先端部分71Bの形状に対応するロック穴73を有する。ロック穴73は、底面72Bにおいて後輪転舵軸50の中立並進位置に対応する箇所に位置する。規制部材71は、後輪転舵軸50に対する位置として、先端部分71Bが回転規制溝72の各側面72Aに対向し、かつ先端部分71Bがロック穴73の外に位置する転舵位置、および先端部分71Bがロック穴73に嵌め込まれる固定位置を有する。
(もっと読む)
ステアリング装置
【課題】シンプルな構成で軽量化しつつ、コストを抑えたステアリング装置を提供する。
【解決手段】ステアリング装置において、入力軸32は、ステアリングホイールの操舵力が入力される。伝達比可変装置30は、入力軸32に連結される遊星歯車機構を有し、入力軸32の入力量に対する出力量の入出力比を変化させる。出力部54は、遊星歯車機構に接続され、出力量に応じて回転する。ロッド12,14は、一端が出力部54に連結し、他端が車輪24,26に連結して出力部54の回転に応じて車幅方向に移動する。
(もっと読む)
操舵装置
【課題】簡易且つ適切に旋回モードを移行させる。
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
操舵装置
【課題】車速センサがフェールした場合であっても、操作性および操縦安定性の低下を抑制する。
【解決手段】操舵装置10は、右側操舵入力部20Rと、左側操舵入力部20Lと、車速センサ40と、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に応じて操舵輪RWを転舵する転舵機構12と、ステアリングECU30により検出された車速に基づいて、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に対する操舵輪の転舵角の比である舵角比を設定するステアリングECU30とを備える。ステアリングECU30は、車速センサ40がフェールした場合、右側操舵入力部20Rの操舵角に対する操舵輪RWの転舵角の比である第1舵角比と、左側操舵入力部20Lの操舵角に対する操舵輪RWの転舵角の比である第2舵角比とを異なる値に設定する。
(もっと読む)
1 - 20 / 2,121
[ Back to top ]