
Fターム[3D233CA21]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 制御、制御対象 (3,368)
Fターム[3D233CA21]の下位に属するFターム
減速機 (293)
駆動力取出し機構(クラッチ) (106)
操舵の中立位置制御 (92)
Fターム[3D233CA21]に分類される特許
1 - 20 / 2,877
ウォームギヤ機構及び同機構を搭載した電動パワーステアリング装置
電動パワーステアリング装置
電子制御装置、および、これを用いた電動パワーステアリング装置
車両のパワーステアリング制御装置
電動パワーステアリング用モータの故障診断装置
車両用操舵装置
トルク検出装置及びパワーステアリング装置
車両用操舵装置
磁歪式トルクセンサ、この磁歪式トルクセンサを搭載した電動アシスト自転車及び電動パワーステアリング装置
【課題】検出精度の高い磁歪式トルクセンサを提供することを課題とする。
【解決手段】回転軸に形成された磁歪部と、この磁歪部の外周を囲うよう配置されるボビンと、このボビンに巻かれて磁歪部の磁気特性の変化を検出するコイルとからなる磁歪式トルクセンサにおいて、ボビンは、磁歪部に接触した状態で、磁歪部に対して相対回転可能に嵌合されている。
【効果】ボビンが磁歪部に接触しているため、コイルを磁歪部の近傍に配置することができる。コイルとボビンとが近いため、コイル又はボビンに生じた温度変化が素早く他方の部材に伝わる。素早く伝えることで、コイルと磁歪部との間の温度差を素早く補正する。素早く補正することで、磁歪式トルクセンサの高い検出精度を確保することができる。
(もっと読む)
車両用操舵装置

【課題】転舵輪側からタイロッドに入力する高周波振動を新規な方法で推定して操作部材に伝達することができ、操舵感が向上する車両用操舵装置を提供する。
【解決手段】ラックハウジング18に加速度センサ30が取り付けられている。FFT処理部52Aは、加速度センサ30の出力信号を、時間領域信号から周波数領域信号に変換する。逆入力振動成分抽出部52Bは、FFT処理部52Aによって得られた周波数領域信号から、周波数fが所定範囲内(fL≦f≦fH(fH>fL))にあり、かつパワー密度ρが所定範囲内(ρL≦f≦ρH(ρH>ρL))にある信号を抽出する。IFFT処理部52Cは、逆入力振動成分抽出部52Bによって抽出された周波数領域信号を時間領域信号(逆入力振動推定値)に変換する。
(もっと読む)
車両用操舵装置
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
車両操舵制御システム
【課題】電力不足の状態が発生した場合に、システム重要度に応じた動作制御を行うことのできる技術を提供する。
【解決手段】EPS−ECU50は、VGRS−ECU20に対して、要求信号を送信する。VGRS−ECU20は、要求信号を受信すると、VGRSアクチュエータの制御を決定するとともに、ARSアクチュエータの制御も決定する。要求信号がアクチュエータの動作停止を要求する場合、VGRS−ECU20は、VGRSアクチュエータおよびARSアクチュエータを、それぞれ動作停止するように制御する。
(もっと読む)
操舵制御装置
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部16は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部110と、操舵輪(W)の実舵角を検出する実舵角検出部21と、目標舵角設定部110によって設定された目標舵角と、実舵角検出部21によって検出された実舵角との偏差を算出し、偏差に基づく積分値に基づいて算出される操舵部の動作量を制御する操舵制御値を、操舵部に出力する操舵制御値演算部120と、操舵制御値演算部120によって算出される積分値の上限を制限する積分値制限部205と、を備える。
(もっと読む)
車両用操舵装置
【課題】ラジオノイズの検査や動作確認検査などを効率よく行うことのできる車両用操舵装置を提供する。
【解決手段】状態検出部70が、車両の状態を検出する。VGRS−ECU20において第1受信部26が外部からコマンドを受信すると、第1判定部27は、車両駆動手段の停止中に、検出される車両状態が、所定の検査モード移行条件を満たしているか判定する。第1動作制御部29は、所定の検査モード移行条件が満たされたことが判定されると、VGRSアクチュエータ21を検査モードで動作可能とさせる。
(もっと読む)
インホイールモータ車用転舵装置
【課題】転舵アクチュエータを用いて、アッパアームに設けた上下方向の転舵軸周りに車輪を回転させるインホイールモータ車用転舵装置において、転舵の際の抵抗を小さくする。
【解決手段】車両のアッパアームに設けた上下方向の転舵軸20周りに転舵手段33を備え、前記転舵手段33は、転舵アクチュエータ10の動作によりホイールwを前記転舵軸20周りに回転させて転舵する機能を有し、前記転舵アクチュエータ10の動作は、前記転舵手段33とは別に設けた操舵入力装置31からの入力信号に基づき制御手段32が制御し、前記制御手段32は、前記ホイールwが転舵する際に前記入力信号に基づいて、そのホイールwに設けた制動手段35の制動を解除又は弛緩する制御を行うインホイールモータ車用転舵装置とした。
(もっと読む)
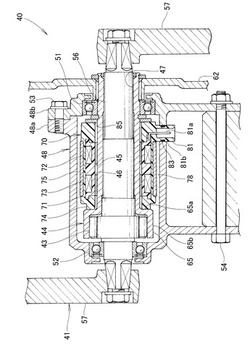
ウォームギヤ装置の製造方法
【課題】ウォームギヤ装置の低寿命化、部品点数の増加、及び製造コストの高騰化を抑えることができ、且つ転がり軸受がウォーム軸に対して軸線方向に沿って相対的に変位することを好適に阻止することができるウォームギヤ装置の製造方法を提供する。
【解決手段】ウォーム軸104と前記ウォーム軸104を回転自在に支持するための転がり軸受として構成された第1軸受106とを備えるウォームギヤ装置10の製造方法において、前記第1軸受106の内輪118を前記ウォーム軸104に圧入して固定する圧入工程と、前記ウォーム軸104に圧入した前記内輪118に対して前記第1軸受106の転動体122と外輪120とを組み付ける組付工程とを行う。
(もっと読む)
電動パワーステアリング装置
【課題】減速歯車機構を収容するギヤボックスが軽量で信頼性が高く且つ寸法安定性及び耐熱性に優れる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、減速歯車機構30を収容するハウジング部材33Aと、ハウジング部材33Aの開口部を覆うカバー部材33Bとが、ボルト33C及びナットにより締結され一体化されたギヤボックス33を備えている。このハウジング部材33A及びカバー部材33Bは、ボルト33Cが挿通されるボルト穴を有する金属製の芯金36Bをインサートとした樹脂材料のインサート成形によって製造されたものである。この樹脂材料は、ガラス転移温度が80℃以上であるポリアミド樹脂を含有する材料である。
(もっと読む)
電動パワーステアリング装置
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
ラック軸力推定方法及び電動パワーステアリング装置
【課題】ステアリングホイールの回転運動をステアリングラック軸及びこれに連結されるタイロッドの直線運動に変換し、操舵輪の転舵を行う電動パワーステアリング装置において、常に精度の良いパワーアシスト制御を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】車両の走行状態を表す物理量に基づいてステアリングラック軸16に作用するラック軸力Fを演算により推定し、ラック軸16と前記タイロッド17Rとの、車体の進行方向に垂直な面内に投影した交差角θを求め、前記交差角θに基づいて、推定された前記ラック軸力Fを補正する。
【効果】車両の走行中、車両が左右に傾いてサスペンションストロークが発生したときにラック軸力を過大に評価することがなくなる。
(もっと読む)
電動パワーステアリング制御装置
【課題】運転者の意思を適切に反映したアシスト制御を可能にする
【解決手段】EPSシステム1では、目標アシストトルク演算部20が、トルクセンサにて検出された操舵トルクTsに基づき、操舵トルクに応じた値の目標アシストトルクを示す目標電流を演算し、モータ駆動回路50が、演算された目標電流に基づいてモータ6を駆動させる。また、操舵角センサが操舵角θsを検出するとともに、微分器62が操舵角速度ωsを演算し、さらに操舵状態量演算部22が、操舵角θsと操舵角速度ωsとに基づいて、操舵状態量を演算する。そして目標アシストトルク演算部20は、演算された操舵状態量に基づき、目標アシストトルクを示す目標電流を変更する。したがって、操舵トルクTsだけではなく操舵角速度ωsによっても目標アシストトルクを変更することができる。
(もっと読む)
1 - 20 / 2,877
[ Back to top ]